针对电梯制动器作为高可靠性设备,其衰退周期长,在真实工作环境中全生命周期下的大量标注数据不易被采集的问题,基于映射的无监督深度迁移学习(UDTL)法,利用仿真制动器的训练网络判定实际制动器的健康状态,从而对真实工作环境中电梯制动器的剩余寿命进行精准预测。方法概括如下:
该方法借助长短期记忆网络自编码器(LSTM-ED)实现对原始数据的特征提取。其根据健康数据训练模型,将网络重构序列与原始序列的差方序列作为特征序列,因此特征领域实际是传感器数据在时间序列上异常值的数据表征,从而保证了不同设备在特征领域中均具有一定的相似性;结合最大平均差异实现仿真数据与实际制动器数据在特征领域的再次对齐,从而保证两者在特征序列上的一致性,提高预测精度。同时,用分步训练法代替传统的联合训练法。在预测过程中,提出在线微调的方法,利用得到的新数据逐步更新特征提取器,从而实现对新设备的高精度寿命预测。
1. 源领域和目标领域
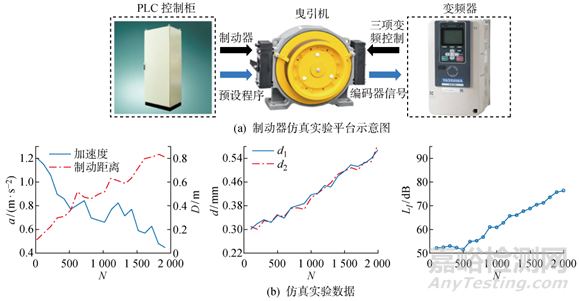
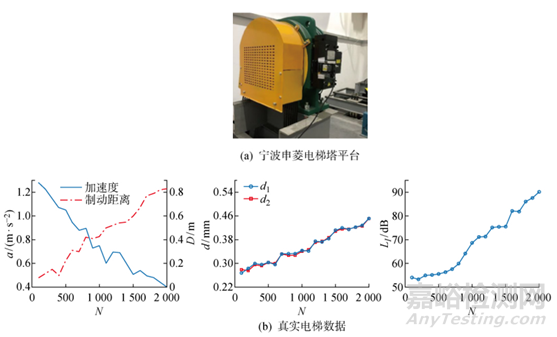
仿真试验平台由迅达曳引机、PLC控制柜和变频器组成,如图1(a)所示。其中,a为加速度,D为制动距离,d为间隙,LI为声强级,N为运行次数。变频器和制动器(110V直流电压)联动能够加速制动器的制动失效,从而仿真制动器制动力不足的失效模式。基于上述方法,采集得到制动器从初始状态运行至失效的全生命周期数据(见图1(b)),并将其作为源领域数据。当制动器在宁波申菱电梯塔(见图2(a))运作时,人工定期检查得到制动器从初始状态运行至失效的全生命周期数据(见图2(b)),并将其作为目标领域数据。利用源领域数据训练模型,并基于特征映射的迁移学习法实现对目标领域的剩余寿命精确预测。
图1 制动器仿真实验
图2 宁波申菱电梯塔实验
2. 无监督的深度迁移学习算法
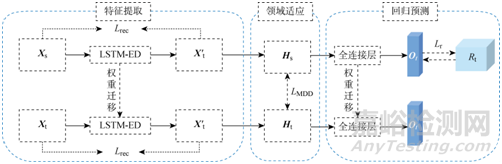
无监督的深度迁移学习算法的整体框图如图3所示,算法的损失函数为:
式中,Lrec为重构模型的损失,LMMD为源领域的特征序列与目标领域的特征序列的迁移损失,Lr为回归的损失;a、b和g为3个损失的修正系数。
图3 无监督的深度迁移学习算法框图
典型的迁移学习多采用将目标领域和源领域的数据整合在一起训练,即将a、b和g均设为非零值进行联合训练。该训练模式未考虑各损失函数的实际意义,易导致对源领域数据的过拟合,而对目标领域数据的预测结果不理想。此外,该方法需要完整的目标领域数据,因此在实际运用中无法对目标领域设备进行在线预测。对此,提出一种分步训练方法,其通过保证各模块的准确性实现RUL精准预测,具体步骤如下:
(1)令b=g =0,将源领域中前10%的数据作为健康状态数据输入,从而更新LSTM-ED网络的权重和偏置。根据训练得到的重构网络,将输入序列转化为与输入等长的特征序列,并将这一过程定义为特征提取。
(2)在进行回归预测训练时,令a=b=0,即将源领域数据的回归误差作为更新权重的损失函数,同时固定LSTM-ED的权重不变,仅更新全连接层的权重和偏置。
(3)权重迁移利用源领域学习得到的LSTM-ED网络和全连接网络,初始化目标领域网络。通过特征提取模块,将新得到的目标领域序列转化为Ht,并将Ht与源领域特征序列Hs进行领域适应,即令a=g =0,利用损失函数更新LSTM-ED,从而减小Ht与Hs的分布误差。
(4)LSTM-ED网络能够针对目标领域数据进行传感器异常监测,因此利用由步骤3)更新后的LSTM-ED参数得到新特征序列,并将其输入到全连接网络中得到当前预测的剩余寿命。该算法预测的剩余寿命值均小于1,其含义为剩余生命周期占总生命周期的比例。若预测值小于90%,则直接将其作为该点的RUL值;若预测值大于90%,则说明该时间段内的数据为电梯制动器前10%的健康生命周期数据,需要根据LSTM-ED的异常值检测特性,令b=g =0、a=1,再次训练更新LSTM-ED参数,并利用新LSTM-ED得到新特征序列,将其作为全连接网络的输入值,重新预测该点的剩余寿命。
其中,步骤(1)和(2)为利用源领域数据进行训练网络,完成之后即可得到针对源领域数据的高精度剩余寿命预测算法。步骤(3)和(4)为借助目标领域数据进行在线微调训练并得到预测结果。
3. 电梯制动器剩余寿命预测性能
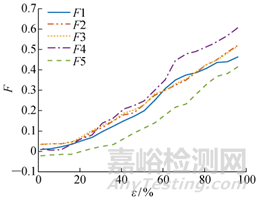
利用传感器网络连续采集制动器间隙、编码器读数、摩擦噪声和制动加速度等相关物理参数,并将数据预处理后作为LSTM-ED网络输入。截取仿真数据中前10%的数据作为健康数据,对LSTM-ED进行训练,并利用训练好的网络将传感器数据投射到如图4所示的特征区域中,其中F为经学习得到的特征值,e为运行进度(运行时间占总寿命的比例)。可知,5个特征值(F1~ F5)随时间的增加而增大,且增大趋势相似,表明LSTM-ED可以作为特征提取器并有效地反映制动器衰退现象。
图4 仿真实验数据提取得到的特征
利用全连接网络对LSTM-ED提取的特征进行回归预测,并利用仿真数据中的真实寿命训练全连接网络。经训练后,仿真数据的损失函数降低至小于0.015,即得到针对源领域数据的高精度剩余寿命预测算法。
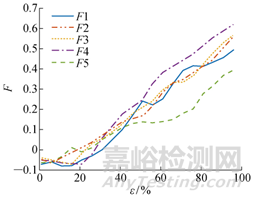
利用在线微调方法即步骤(3)和步骤(4),进一步训练LSTM-ED的特征提取器参数,并基于新的特征提取器将电梯塔中的数据转化为如图5所示的特征数据。可知,该提取器同样可以作为特征提取器并有效地反映制动器衰退现象。
图5 电梯塔数据通过UDTL学习得到的特征
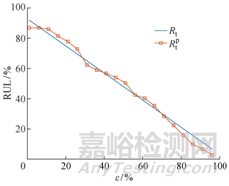
在预测过程中,利用全连接层预测回归得到的特征,预测结果如图6所示。可见,剩余寿命的预测曲线与真实曲线的吻合度较高。为量化UDTL的预测结果,引入平均绝对值误差(MAE)、均方误差(MSE)和均方根误差(RMSE),经计算MAE=0.03、MSE=0.0016、RMSE=0.04。可知,利用UDTL预测的误差均很小,表明UDTL可以有效预测真实工况下的电梯制动器剩余生命周期。
图6 UDTL对电梯塔的剩余生命周期预测
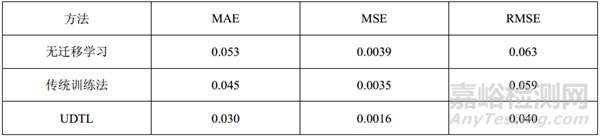
同时为验证UDTL的有效性,将未进行迁移学习的预测算法和传统训练法作为对比,进行电梯塔数据的剩余寿命预测,并计算不同方法下电梯塔的剩余寿命预测误差,结果如表1所示。可知,在MSE方面,UDTL方法较无迁移学习的情况降低了59%,较传统训练法降低了54%,证明该方法能够有效提高电梯制动器寿命预测的准确度。
表1 不同方法下电梯塔的剩余生命周期预测误差