您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2022-06-06 14:29
前言导读
手术机器人是一种先进的医疗设备,借助微创伤手术及相关底层技术的发展而发明。手术机器人是医疗机器人的一种细分领域。手术机器人,即外科医生能够通过远程控制,并通过微小切口精密操作进入患者体内的手术器械,从而辅助外科医生进行微创手术的精密操作型机器人。
手术机器人被用于在高于人类能力的微创伤手术领域中实现高于人类能力的对手术器械的精准操控。手术机器人通常由手术控制台、配备机械臂的手术车及视像系统组成。外科医生坐在手术控制台,观看由放置在患者体内腔镜传输的手术区域三维影像,并操控机械臂的移动,以及该机械臂附带的手术器械及腔镜。机械臂模拟人类的手臂,为外科医生提供一系列模拟人体手腕的动作,同时过滤人手本身的震颤。
机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床上外科上有大量的应用。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
市场分析
当前,随着人工智能、物联网等新科技的快速渗透,医疗健康正在与机器人全面融合,引领外科技术大变革。手术机器人行业迎来快速发展,赛道火热,备受资本青睐。
根据Frost & Sullivan的统计,2020 年全球机器人手术市场规模为 61 亿美元,预计从 2021 年到 2028 年将以 17.60% 的复合年增长率增长,到 2028 年将达到 222.7 亿美元(折合人民币约为1414亿元)。
我国手术机器人市场发展迅猛,根据Frost & Sullivan的统计,市场规模由2016年的人民币853.6百万元增至2020年的人民币2,934.5百万元,年复合增长率达36.2%,预计2030年中国手术机器人的市场规模将达至人民币58,425.9百万元,年复合增长率为34.9%。
手术机器人是将机器人技术应用在医疗领域,显然的,机器人手术是使用机器人系统完成的外科手术类型,机器人辅助手术的开发旨在克服现有的微创手术程序的局限性,并增强外科医生进行开放手术的能力。
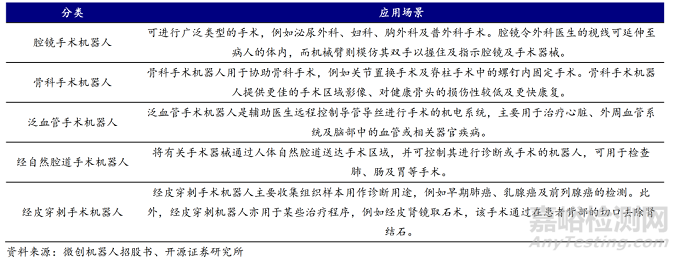
手术机器人集成了医学、材料学、自动控制学、数字图像处理学、生物力学、机器人学等诸多学科为一体的新型交叉科学。一般情况下,从临床医学应用角度可将手术机器人主要分为腔镜手术机器人、骨科手术机器人、泛血管手术机器人、 经自然腔道手术机器人、经皮穿刺手术机器人。
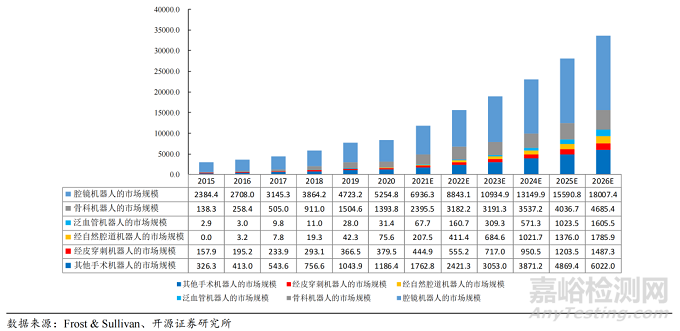
下面两幅附图分别给出了各主要细分手术机器人的应用场景和市场规模情况,供各位读者参考。
笔者认为,随着时间发展,对于国内手术机器人市场而言,各大厂商会面临如下5个方面的竞争,分别为:
1.技术战,入局者众多,内卷严重,而且在技术上目前国外先进巨头具有一定优势,国内厂家只有通过技术上“高人一等”才能“脱颖而出”。
2.临床战,目前手术机器人虽然种类繁多,但是依然是医械法规强监管的产业,且市场受众面以大城市的大医院为主体,在如此众多的品牌上市过程中,临床资源就显得弥足珍贵。
3.融资战,手术机器人是一个多学科高度集中的产品,研发周期长,临床要求高,各方面人力资源也紧张稀缺,必然需要高额的投入,这些都需要大量的资本投入,因此手术机器人的玩法从资本市场来讲其实就是“谁的资本强谁成功率大”。
4.营销战,随着国内、国外厂商的产品逐步上市,需要“卖出去”,也需要市场各群体的认同,更需要占据市场率,因此在众多同类型同适应症的手术机器人中“卖得好”才是各大厂商的终极目标,才是“长久之计”。
5.专利战,专利对于手术机器人而言十分重要,当然也是技术层面的演化,更是各大手术机器人厂商市场角力的重要武器,甚至是“终极核武”,规避设计风险、占据市场率都需要专利的辅助,达芬奇在腔镜机器人领域“叱咤风云”恰恰是得益于专利。
关于微创医疗机器人
上海微创医疗机器人成立于2014年,注册地位于张江科学城,是一家医疗器械公司,致力于设计、开发及商业化创新手术机器人,以协助外科医生完成复杂的外科手术。经过多年的发展,目前已成为全球唯一一家业务覆盖腔镜、骨科、泛血管、经自然腔道和经皮穿刺五大“黄金赛道”的手术机器人公司。
微创机器人公司致力于面向微创伤手术的前沿发展需求,运用机器人、智能控制、传感与信息领域的高精尖研究和产业集成,创新性提供能够延长和重塑生命的机器人智能手术全解方案,建设一个全球化布局的医疗机器人全解方案创新平台。
专利分析
对于微创医疗机器人,目前其产品组合包括三款已获NMPA批准的产品及多款处于不同研发、临床、注册阶段的候选产品。本文聚焦三款已获NMPA批准的产品,对于其他产品将在今后文章系再系统阐述。完整专利清单和报告笔者也汇总完成,如若获取完整专利清单和报告可以与笔者取得联系,共同交流学习:
图迈
2022年1月,微创医疗科学有限公司旗下子集团上海微创医疗机器人(集团)股份有限公司自主研发的图迈Toumai四臂腔镜手术机器人获得国家药品监督管理局(NMPA)的上市批准。
微创图迈是一个融合多学科高科技含量技术于一体的高端医疗设备,由医生控制台、患者手术平台和图像平台组成,其采用主从式遥操作技术,实现医生可远离手术台并坐姿操作的手术方式,减轻医生负担;结合机器人技术优势,实现更微创、精准、稳定、安全的手术操作;可广泛适用于各类外科手术,包括泌尿外科、妇科、胸外科及普外科等术式。
与传统腔镜手术相比,微创图迈机器人具有手术视野立体真实、微型器械精细操控、狭窄空间下高灵巧运动等众多技术优势,给复杂腔镜手术涉及的狭窄解剖空间下分离止血、缝合打结、功能重建等外科操作带来重要临床价值,同时,克服传统开放手术的创伤大、出血多、并发症概率高等问题,真正实现精准、安全、高效、微创伤的外科手术操作。
部分相关核心专利可参照如下:
1
|
公开/公告号 |
CN105232153B
|
申请日 |
2015-09-08
|
|
发明名称 |
机械臂
|
||
|
解决的技术问题 |
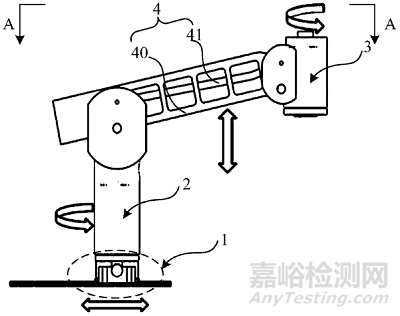
本申请的机械臂具有四自由度调整结构,能够灵活的调整安装于第二旋转关节上的工具臂的手术指向。与此同时,由于水平移动关节滑块部件及平行四边形机构均存在于相关的零部件内部,使得机械臂整体结构较为紧凑,在不影响机械臂整体刚度的情况下,能够较好的保持工具臂的姿态稳定性,进一步提高了机械臂的灵活性。
|
||
|
技术方案 |
本发明提供了一种机械臂,滑动部件、第一旋转关节、摆动部件及第二旋转关节顺次连接;所述摆动部件包括连杆和拉杆,所述连杆的两端分别与所述第一旋转关节和所述第二旋转关节相连,所述拉杆的两端分别与所述第一旋转关节和所述第二旋转关节相连,形成四个连接点,所述四个连接点顺次相连的连线形成平行四边形。
|
||
|
相关附图 |
|
||
2
|
公开/公告号 |
CN106308933B
|
申请日 |
2016-08-31
|
|
发明名称 |
传动机构以及手术器械 |
||
|
解决的技术问题 |
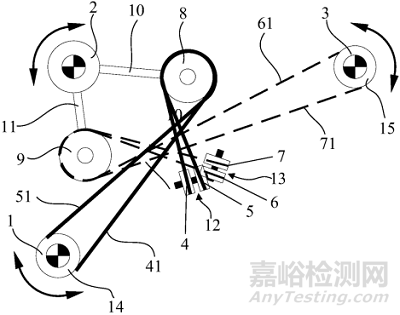
发明的传动机构主要设置于手术器械上,用于驱动所述手术器械之末端器械运动,其仅包括四根牵引体、三根驱动轴以及导向机构,零件使用量少,使用成本低;而且,本发明的传动机构仅通过三根驱动轴的转动带动对应的四根牵引体运动即可驱动末端器械做三个自由度运动,不仅驱动结构简单,驱动方便,而且仅使用四根牵引体实现三个自由度的运动,相比于现有采用六根钢丝绳的传动机构,减少了钢丝绳及配套部件的数量,节约了空间,简化了驱动控制,进而也可使得手术器械的尺寸可以做得更小,继而使微创伤创口可以开的更小,同时还可以使手术器械在人体狭小空间中的运动更为的灵活,手术操作的灵活性好;并且,基于牵引体驱动的传动机构,整体质量轻,传动的稳定性和可靠性也更好。
|
||
|
技术方案 |
本发明提供了一种传动机构和手术器械。本发明的传动机构设置于手术器械上,用于驱动位于手术器械之末端的末端器械运动,并包括导向机构、第一、二、三驱动轴以及第一、二、三、四牵引体,三根驱动轴平行设置,其中第一、二牵引体以相反的方向围绕并部分固连第一驱动轴,并通过导向机构改变方向后与末端器械固连,第三、四牵引体以相反的方向围绕并部分固连第三驱动轴,并通过导向机构改变方向后与末端器械固连,所述导向机构被配置成,当所述第二驱动轴转动时,所述第一、二牵引体位于导向机构与末端器械之间的部分,同第三、四牵引体位于导向机构与末端器械之间的部分运动方向相反。本发明的手术器械包括本发明的传动机构。 |
||
|
相关附图 |
|
||
鸿鹄
2022年4月,上海微创医疗机器人(集团)股份有限公司的全资子公司苏州微创畅行机器人有限公司自主研发的鸿鹄骨科手术机器人获得国家药品监督管理局(NMPA)的上市批准。
微创鸿鹄已展现出操作精准、高效协同、安全保护和兼容性强等技术优势。术前,其规划系统可基于患者术前CT扫描数据及假体模型数据,协助医生制定个性化假体植入方案。术中,它基于手术规划的精准定位,通过配准技术并结合自主研发的高灵巧、轻量化机械臂,能够快速完成截骨,提升手术精准度及效率。微创鸿鹄能够避免传统手术中的髓腔定位,术中无髓内杆植入,可降低手术损伤及出血量,改善术后下肢力线、减少并发症,帮助患者实现术后快速康复。
与传统腔镜手术相比,微创图迈机器人具有手术视野立体真实、微型器械精细操控、狭窄空间下高灵巧运动等众多技术优势,给复杂腔镜手术涉及的狭窄解剖空间下分离止血、缝合打结、功能重建等外科操作带来重要临床价值,同时,克服传统开放手术的创伤大、出血多、并发症概率高等问题,真正实现精准、安全、高效、微创伤的外科手术操作。
部分相关核心专利可参照如下:
1
|
公开/公告号 |
CN110811832B
|
申请日 |
2019-11-21
|
|
发明名称 |
截骨校验方法、校验设备、可读存储介质及骨科手术系统
|
||
|
解决的技术问题 |
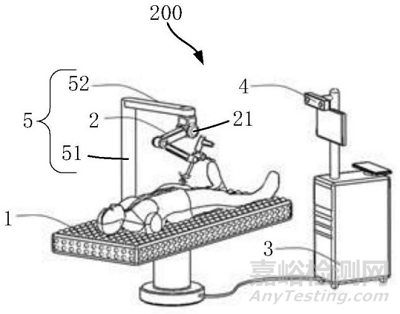
在本发明提供的截骨校验方法、校验设备、可读存储介质及骨科手术系统中,首先利用截骨校验设备获取当前截骨平面的计算位置信息,进而基于规划截骨平面的预定位置信息,确定所述计算位置信息与所述预定位置信息的位置误差,若所述位置误差超过预设值,则计算并获得重新定位信息,并将所述重新定位信息传输给机械臂,以重新进行定位。如此配置,通过对首次截骨形成的当前截骨平面与规划的预定截骨平面的位置误差的对比和识别,使机械臂再次进行定位,进而二次修正截骨平面,可提高最终的截骨平面的精度。此外,通过机械臂进行再定位,并二次修正截骨平面,可避免使用额外的骨钉将导向工具重复固定在骨头上,减少病人的创伤面,并缩减手术时间。 |
||
|
技术方案 |
本发明提供一种截骨校验方法、校验设备、可读存储介质及骨科手术系统中,首先利用截骨校验设备获取当前截骨平面的计算位置信息,进而基于规划截骨平面的预定位置信息,确定所述计算位置信息与所述预定位置信息的位置误差,若所述位置误差超过预设值,则计算并获得重新定位信息,并将所述重新定位信息传输给机械臂,以重新进行定位。如此配置,通过对首次截骨形成的当前截骨平面与规划的预定截骨平面的位置误差的对比和识别,使机械臂再次进行定位,进而二次修正截骨平面,可提高最终的截骨平面的精度。此外,通过机械臂进行再定位,并二次修正截骨平面,可避免使用额外的骨钉将导向工具重复固定在骨头上,减少病人的创伤面,并缩减手术时间。 |
||
|
相关附图 |
|
||
2
|
公开/公告号 |
CN110897717B |
申请日 |
2019-12-09 |
|
发明名称 |
导航手术系统及其注册方法与电子设备
|
||
|
解决的技术问题 |
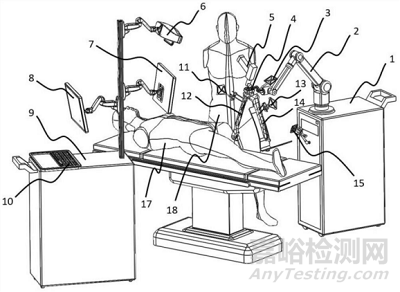
在本发明提供的导航手术系统及其注册方法中,通过将机械臂基坐标系的位置与支撑装置固定,以及将能够被导航跟踪设备所识别的基准坐标系的位置与支撑装置固定,可直接配准机械臂和导航跟踪设备间的相对位置,而无需在机械臂末端或机械臂基座上安装靶标进行机械臂注册,从而简化了手术流程,缩短了手术区域暴露时间,减小了患者受感染的几率。特别地,在手术过程中,由于不需要在机械臂上安装靶标,使得机械臂末端位置的采集不会受到机械臂运动过程中震动的影响,因此,确保了机械臂末端位置采集的可靠性和实时性。 |
||
|
技术方案 |
本发明涉及一种导航手术系统及其注册方法与电子设备,导航手术系统包括通信连接的机器人系统和导航系统;机器人系统包括机械臂,导航系统包括导航跟踪设备;机器人系统具有建立在机械臂上的机械臂基坐标系,机械臂基坐标系被配置为相对于支撑装置的位置固定;导航系统具有能被导航跟踪设备识别的基准坐标系,基准坐标系被配置为相对于支撑装置的位置固定;导航手术系统被配置为根据机械臂基坐标系与支撑装置的位置关系,以及基准坐标系与支撑装置的位置关系,获得机械臂和导航跟踪设备间的位置关系。这样做,无需机械臂注册,可直接配准机械臂和导航跟踪设备间的位置,简化手术流程,缩短手术时间,可以确保机械臂末端位置采集的可靠性和实时性。
|
||
|
相关附图 |
|
||
蜻蜓眼
蜻蜓眼DFVision三维电子腹腔内窥镜,是中国首款进入国家创新医疗器械特别审批程序(“绿色通道”)的国产三维电子腹腔镜,该产品已于2021年6月获得国家药品监督管理局(NMPA)颁发的医疗器械注册证。
蜻蜓眼DFVision三维电子腹腔内窥镜由包括高分辨率成像物镜的电子镜结构组成。在实现双路图像全高清呈现的同时,摒弃了传统腹腔镜庞大的光学机构,大幅减轻镜体重量。3D成像和丰富的色彩,高度还原手术区域,增强视觉效果,真实呈现人体器官的解剖层次,使术者操作更加便利,缩短腹腔镜的学习曲线。
在手术中,蜻蜓眼所提供的具有立体感、纵深感的手术视野,对手术中精准地游离、缝合和打结具有重要意义,可有效减少手术时间、提升手术质量、提高手术效率,突破传统二维腹腔镜手术的局限性,可以广泛地应用于普外科、妇科与泌尿科等临床科室。
部分相关核心专利可参照如下:
1
|
公开/公告号 |
CN105455768B |
申请日 |
2015-12-25
|
|
发明名称 |
电子内窥镜
|
||
|
解决的技术问题 |
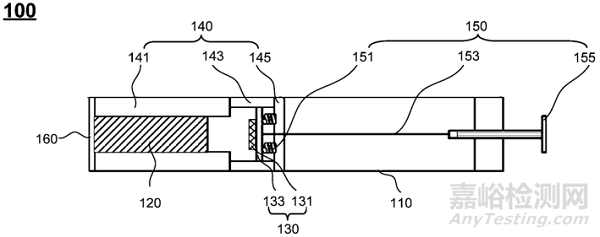
在本发明提供的电子内窥镜中,通过轴向位置调节装置调节成像透镜组与感光组件的间距,使得所述电子内窥镜具有较高倍率的调焦功能,从而极大地提高了所述电子内窥镜在使用过程中的自由度,即使面对微小的观察目标也能够放大观察,并获得清晰的图像。 |
||
|
技术方案 |
在本发明提供的电子内窥镜中,通过轴向位置调节装置调节成像透镜组与感光组件的间距,使得所述电子内窥镜具有较强的调节像距功能,从而极大地提高了所述电子内窥镜在使用过程中的自由度,即使面对微小的观察目标也能够放大观察,并获得清晰的图像。 |
||
|
相关附图 |
|
||
结 语
诚如领域内人士共同认识的那样,手术机器人逐渐赢得市场追捧,站上了智能精细化发展、医保政策利好的快车道,全球以及国内各大手术机器人厂商也必会将达芬奇、美敦力机器人、微创医疗等作为重要的标杆和对照,联动产学研医生多方力量,不断创新,推动中国手术机器人行业更智能化、精准化、微创化的发展,相关知识产权问题也必将会成为各大手术机器人厂商的研究重点课题,后续相关产品的的研发和专利事务值得持续关注。
需要特别说明的是,对于手术机器人,笔者对国内外各大厂家均进行了详细研读和分析,形成了卓有成效的工作成果,感兴趣的读者可与笔者取得联系,共同交流学习。
来源:医械知识产权