导 语
近日,西安交通大学研究团队开展了一项研究,提出了一种可用于外骨骼关节的新型磁流变阻尼器,为未来外骨骼进行神经康复及运动控制的研究提供了积极的启示。相关研究成果已发表在《IEEE Transactions on Neural Systems and Rehabilitation Engineering》。
随着机电系统的发展,近年来下肢外骨骼辅助人体运动的应用领域越来越多,其中承重外骨骼以其便捷的优点受到青睐。考虑到外骨骼驱动器的负载性能和便携性,完全依赖电机制动来辅助人体步态可能是不可取的。一些研究者关注于被动式或半主动装置来辅助人体。配备磁流变阻尼器的半主动装置也被开发出来,为外骨骼和矫形器提供可控和有效的制动。然而,如何设计出能够满足高扭矩输出和长时间运行耐久性要求的新型磁流变(MR)阻尼器仍然是一个需要解决的问题。
2、研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
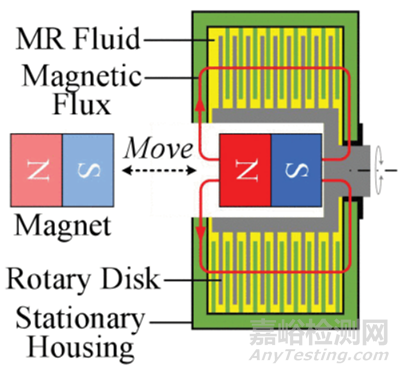
本研究提出的磁流变阻尼器采用可变位移永磁体来调节磁场强度,如图1所示。通过控制小型电机,可以调节永磁体在关节腔中的位置,改变关节内磁流体的状态,实现对关节阻尼力矩的调节。与传统线圈式磁流变阻尼器相比,本文提出的磁流变阻尼器改进了磁场强度调节的原理。具体来说,就是通过调节永磁体的位移来代替调节线圈中的电流来调节磁场强度。高磁化量的永磁体磁场强度优于线圈,提高了磁流变阻尼器的最大转矩密度。同时,其形状适合于接头的装配。其最显著的特点是可以长时间使用而不会因线圈加热而产生扭矩衰减。对永磁体的分段参数进行了优化,使磁场强度变化均匀,提高了线性控制精度。
图1:阻尼器工作原理
(图片来自原文)
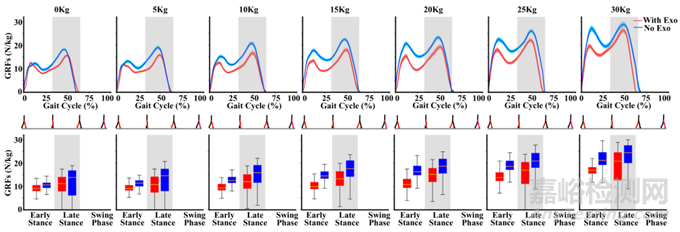
为验证阻尼器性能,该项研究设计了相关实验,分析了带外骨骼和不带外骨骼参与者的地反力(GRF),GRF代表了外骨骼载荷传递的影响。
如图2所示,是否佩戴外骨骼和载荷水平对实验结果有一定影响。在摆动阶段,由于脚没有接触地面,GRF没有显示出外骨骼设备和负载的主要影响。如图3所示,与无外骨骼相比,有外骨骼受试者的GRF峰值显著降低(p < 0.05):站立前期GRF峰值降低24.14%,站立后期GRF峰值降低19.77%。对于载荷的影响,总姿态相位的峰值GRF随着载荷量的增加而显著增加。而在后期,0kg和5kg的GRF值之间没有显著差异。步态周期中站立相位持续时间的分析没有揭示外骨骼设备和负荷水平之间的显著性。设备和负荷对运动的影响不显著,但在某些负荷水平上,站立时间的GRF显著不同于其他负荷水平。例如,对于0kg和5kg载荷,GRF虽然没有显著差异,但明显低于其他载荷水平的值;10kg和15kg的GRF值无显著差异,但显著高于其他载荷水平。
图2:不同负荷条件下带外骨骼和不带外骨骼的GRF
(图片来自原文)
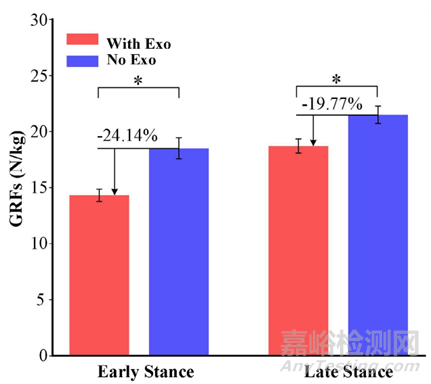
图3:不同负荷条件下带外骨骼和不带外骨骼的GRF
(图片来自原文)
3、研究意义
本研究提出了一种新型磁流变阻尼器,它可以根据磁体的可变位移来调节输出电阻转矩。通过优化设计和实验标定对磁流变阻尼器接头的输出特性进行了表征。此外,MR阻尼器安装在被动下肢外骨骼的膝关节中。
本研究提出了一种基于步态相位识别的磁流变阻尼器实时控制方法。为了验证磁流变阻尼器外骨骼对人体负重辅助的有效性,进行了初步的主体实验。根据采集到的足底压力信息,比较有无外骨骼受试者的GRF数据意义。最后,基于NLB和NFB指标,对外骨骼进行了评估,这表明了所提出的MR阻尼器的有效性。
参考文献:Song J, Zhu A, Tu Y, et al. Magnetorheological Damper With Variable Displacement Permanent Magnet for Assisting the Transfer of Load in Lower Limb Exoskeleton [J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2024, 32: 43-52. DOI:10.1109/TNSRE.2023.3338969.