您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2022-09-05 11:58
前言
手术机器人是一种先进的医疗设备,借助微创伤手术及相关底层技术的发展而发明。手术机器人是医疗机器人的一种细分领域。手术机器人,即外科医生能够通过远程控制,并通过微小切口精密操作进入患者体内的手术器械,从而辅助外科医生进行微创手术的精密操作型机器人。
手术机器人被用于在高于人类能力的微创伤手术领域中实现高于人类能力的对手术器械的精准操控。手术机器人通常由手术控制台、配备机械臂的手术车及视像系统组成。外科医生坐在手术控制台,观看由放置在患者体内腔镜传输的手术区域三维影像,并操控机械臂的移动,以及该机械臂附带的手术器械及腔镜。机械臂模拟人类的手臂,为外科医生提供一系列模拟人体手腕的动作,同时过滤人手本身的震颤。
机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床上外科上有大量的应用。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
市场分析
当前,随着人工智能、物联网等新科技的快速渗透,医疗健康正在与机器人全面融合,引领外科技术大变革。手术机器人行业迎来快速发展,赛道火热,备受资本青睐。
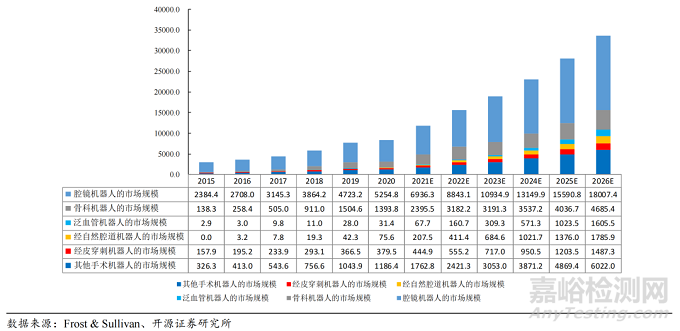
根据Frost & Sullivan的统计,2020 年全球机器人手术市场规模为 61 亿美元,预计从 2021 年到 2028 年将以 17.60% 的复合年增长率增长,到 2028 年将达到 222.7 亿美元(折合人民币约为1414亿元)。
我国手术机器人市场发展迅猛,根据Frost & Sullivan的统计,市场规模由2016年的人民币853.6百万元增至2020年的人民币2,934.5百万元,年复合增长率达36.2%,预计2030年中国手术机器人的市场规模将达至人民币58,425.9百万元,年复合增长率为34.9%。
手术机器人是将机器人技术应用在医疗领域,显然的,机器人手术是使用机器人系统完成的外科手术类型,机器人辅助手术的开发旨在克服现有的微创手术程序的局限性,并增强外科医生进行开放手术的能力。
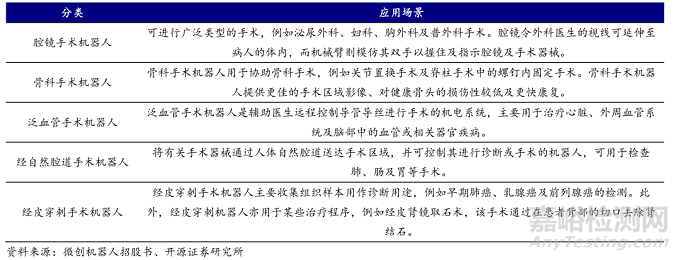
手术机器人集成了医学、材料学、自动控制学、数字图像处理学、生物力学、机器人学等诸多学科为一体的新型交叉科学。一般情况下,从临床医学应用角度可将手术机器人主要分为腔镜手术机器人、骨科手术机器人、泛血管手术机器人、 经自然腔道手术机器人、经皮穿刺手术机器人。
下面两幅附图分别给出了各主要细分手术机器人的应用场景和市场规模情况,供各位读者参考。
笔者认为,随着时间发展,对于国内手术机器人市场而言,各大厂商会面临如下5个方面的竞争,分别为:
1.技术战,入局者众多,内卷严重,而且在技术上目前国外先进巨头具有一定优势,国内厂家只有通过技术上“高人一等”才能“脱颖而出”。
2.临床战,目前手术机器人虽然种类繁多,但是依然是医械法规强监管的产业,且市场受众面以大城市的大医院为主体,在如此众多的品牌上市过程中,临床资源就显得弥足珍贵。
3.融资战,手术机器人是一个多学科高度集中的产品,研发周期长,临床要求高,各方面人力资源也紧张稀缺,必然需要高额的投入,这些都需要大量的资本投入,因此手术机器人的玩法从资本市场来讲其实就是“谁的资本强谁成功率大”。
4.营销战,随着国内、国外厂商的产品逐步上市,需要“卖出去”,也需要市场各群体的认同,更需要占据市场率,因此在众多同类型同适应症的手术机器人中“卖得好”才是各大厂商的终极目标,才是“长久之计”。
5.专利战,专利对于手术机器人而言十分重要,当然也是技术层面的演化,更是各大手术机器人厂商市场角力的重要武器,甚至是“终极核武”,规避设计风险、占据市场率都需要专利的辅助,达芬奇在腔镜机器人领域“叱咤风云”恰恰是得益于专利。
专利分析
诚如上文所提到的那样,目前,手术机器人的开发主要集中于腔镜手术机器人、骨科手术机器人、血管介入手术机器人、经自然腔道手术机器人、穿刺手术机器人这五大类,本文笔者以这五类为主要对象展开简单分析。
01腔镜手术机器人
腔镜手术机器人可进行广泛类型的手术,例如泌尿外科、妇科、胸外科及普外科手术。腔镜令外科医生的视线可延伸至病人的体内,而机械臂则模仿其双手以握着及指示腔镜及手术器械。需要特别说明的是,腔镜手术机器人是商业化最成功的手术机器人代表,根据 Frost & Sullivan 数据,2016~2020 年,全球腔镜手术机器人市场规模从27.1亿美元增加到52.5亿美元,复合增速为18.0%, 预计到 2026 年将达到 180.1 亿美元,复合增速 22.8%。
对于腔镜手术机器人,直观外科公司(Intuitive Surgical)因上市时间久、使用地区广等先发优势,旗下达芬奇手术机器人系统(da Vinci)占据全球垄断地位,另外,英国公司CMR Surgical 旗下的Versius手术机器人、美敦力旗下的Hugo手术机器人、Titan Medical旗下的Enos手术机器人等多个机器人品牌也具备较高的影响力。对于国内市场,微创医疗的图迈、威高医疗的妙手已获批注册,术锐医疗、精锋医疗、康多医疗等多个厂商手术机器人临床进程中,竞争格局初步显现。
本文以达芬奇手术机器人系统为例,对腔镜手术机器人展开简单的专利分析。
达芬奇(da Vinci)手术机器人由美国直观医疗公司制造生产。美国直观医疗公司创立于1995年,总部设在美国加州,是开发革命性微创手术仪器和技术的先驱。
1999年,第一台达芬奇手术机器人面世。2000年,达芬奇手术机器人正式成为第一个受FDA批准用于临床手术的机器人辅助腹腔镜手术系统。
20 多年来,达芬奇平台开创了手术室的新功能,改变了微创手术领域。通过超过 500 万次手术,Intuitive已成为手术机器人领域公认的领导者。
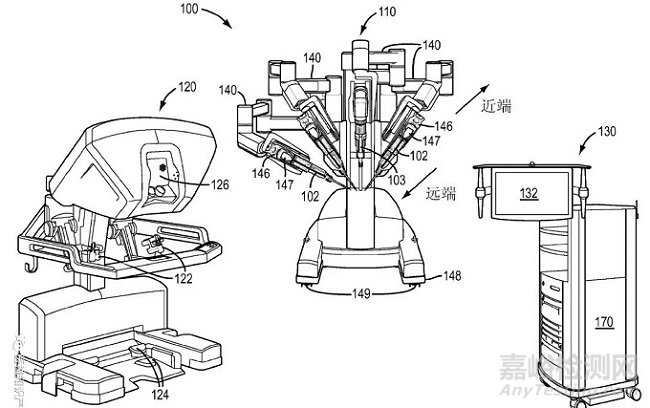
系统主要由三部分组成:医生操控台、床旁机械臂系统以及影像处理平台。主刀医生坐在控制台前控制器械和镜头;床旁机械臂系统是达芬奇手术机器人的操作部分,它放置在患者身旁为器械和镜头提供支撑,并实现医生的操作;影像处理系统,为患者身边的手术团队提供图像信息。
达芬奇系列手术机器人共经历的四代进化。
达芬奇机器人1996年推出了第一代,2006年推出的第二代机器人机械手臂活动范围更大了,允许医生在不离开控制台的情况下进行多图观察。
2009年在第二代机器人的基础上增加了双控制台、模拟控制器、术中荧光显影技术等功能,进而推出了第三代达芬奇Si系统。
第四代达芬奇Xi系统在2014年推出,灵活度、精准度、成像清晰度等方面有了质的提高,公司在2014年下半年还开发了远程观察和指导系统。
从上文的技术脉络可以得知,对于达芬奇手术机器人而言,直观医疗布局了数量庞大的专利帝国,笔者选取了2组进行解读,相关相关结果如下:
|
公开/公告号 |
CN104799890B |
申请日 |
2010-11-10 |
|
发明名称 |
弯曲套管和机器人操纵器 |
||
|
解决的技术问题 |
为了进一步减少病人创伤并且保留机器人手术系统的益处,外科医生已经开始执行通过经皮肤的单个切口来研究或处理病人状况的手术程序。在一些情况下,这样的“单端口入路(port access)”手术已经采用手动器械或采用现有机器人手术系统执行。因此,期望的是改进的设备和方法,与使用现有的设备和方法相比,其能够使外科医生更有效地进行单端口入路手术。还期望的是能够容易地修改一般用于执行这种单端口入路手术的多切口(多端口)手术的现有机器人手术系统。 |
||
|
技术方案 |
一种机器人手术系统配置有(多个)刚性的弯曲套管(416a),这些套管延伸穿过同一个开口进入病人体内。具有(多个)被动柔性轴(506)的手术器械(500)延伸穿过这些弯曲套管。这些套管被定向为朝手术部位引导器械。公开了一种远程操作控制系统,该系统以一种允许外科医生体验直观控制的方式移动这些弯曲套管及其相关联的器械。这些柔性轴器械被控制为就好像沿着一条虚拟的直线插入和抽出轴线进行延伸。公开了在该单个开口内支撑弯曲套管的各种端口构件(1402)。公开了在插入到该单个开口以及安装至机器人操纵器上的过程中支撑这些套管的(多个)套管支撑固定件(1902)。 |
||
|
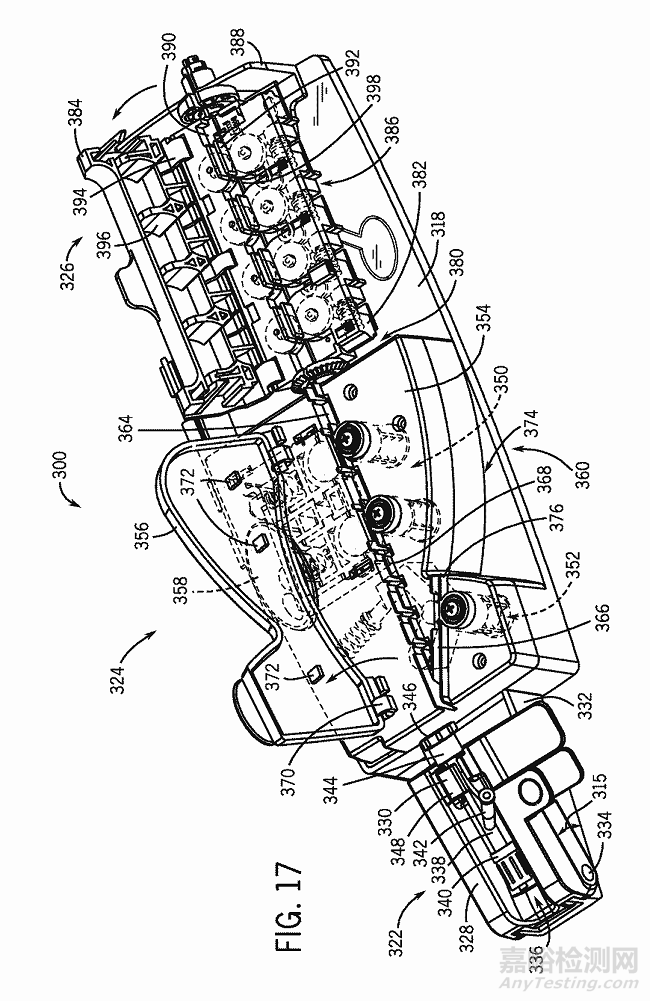
相关附图 |
|
||
|
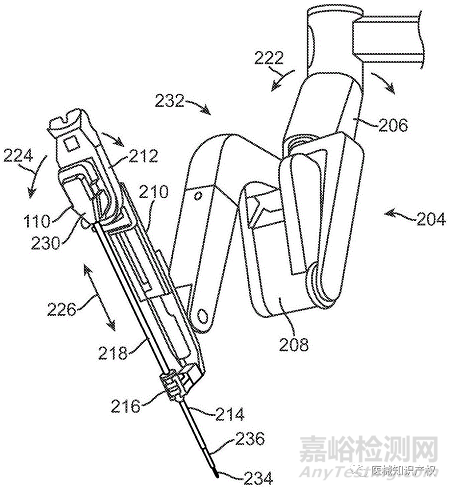
公开/公告号 |
CN105050531B |
申请日 |
2014-03-13 |
|
发明名称 |
具有操控界面的外科患者侧手推车 |
||
|
解决的技术问题 |
移动远程操作的外科系统的患者侧手推车中的一个考虑是患者侧手推车可由使用者容易移动。由于其重量、大小和全部构造,可期望提供患者侧手推车以传动装置以帮助使用者移动患者侧手推车。这样的传动装置可基于来自使用者的输入而被控制,以相对容易的方式移动患者侧手推车。进一步,可期望提供患者侧手推车以控制机构,以驱动和移动不是复杂的而是相对容易使用的患者侧手推车。 |
||
|
技术方案 |
用于远程操作的外科系统的患者侧手推车包括至少一个保持外科器械的操纵器部分和操控界面。操控界面可包括至少一个传感器,其被安置以感测使用者施加的以移动手推车的旋转力、向前力、向后力。操控界面可进一步包括连接机构,以可移除地连接操控界面与患者侧手推车。至少一个传感器可被放置以当操控界面处于与患者侧手推车的连接状态时与患者侧手推车的驱动控制系统信号连通。 |
||
|
相关附图 |
|
||
02骨科手术机器人
骨科手术机器人是利用机器人、导航定位、自动控制、先进传感器等新技术,为外科医生提供稳定的操作平台、精确的定位和智能的操作手段的创新医疗设备。骨科手术机器人用于辅助骨科手术,其带来的好处包括精准、定制三维术前方案、手术部位更清楚、减少震颤和提高手术精准度。使用骨科手术机器人亦有助减少对健康骨骼及组织的损伤、减少失血、缩短住院时间及加快康复。
根据 Frost & Sullivan 数据,全球手术机器人市场近年来保持高速增长,从2016年2.6亿美元增长至2020年13.9亿美元,预计到2026年将达到46.9亿美元,是手术机器人第二大市场。
就应用场景而言,骨科手术机器人主要应用于三类手术,即关节置换手术、脊柱手术及骨科创伤手术。对于骨科手术机器人,有着较多的布局该细分赛道,可以说骨科手术机器人也是竞争激烈的手术机器人细分领域,如:美敦力的Mazor、史赛克的Mako、捷迈邦美的Rosa、施乐辉的Cori、强生的VELYS、Globus的ExcelsiusGPS等多个机器人品牌均具备较高的影响力。对于国内市场,天智航、 鑫君特、骨圣元化、键嘉、铸正等多个厂商的骨科手术机器人均已上市,且多家厂商的骨科机器人目前已进入临床注册阶段,可见骨科手术机器人赛道竞争格外激烈。
本文以史赛克的Mako和美敦力的Mazor手术机器人系统为例,对骨科手术机器人展开简单的专利分析。
史赛克-MAKO
Mako手术机器人于2006年在美国上市,能够协助医生完成全髋关节置换术、全膝关节置换术及单髁关节置换术。截止至2020年,全球范围内超过28个国家装机使用Mako机器人,14年内总计完成手术超过350,000台。
Mako机器人基于两大核心技术:智能手术规划技术和智能辅助截骨技术。智能手术规划技术基于CT进行3D的智能建模,为患者生成个性化的手术方案,同时提供术中动态调整,最大程度的将关节手术推向精准化、个性化。智能辅助截骨技术采用创新高效的截骨模块,能够实现高速磨钻、摆锯和动力手机的集成,同时在术中实现毫米级精确截骨控制和制动巡航截骨保护,为术者赋能,实现微创化、精细化的截骨控制。
2006年,第一代Mako骨科机器人于美国佛罗里达州诞生,并成功实施了首例单髁膝关节置换手术。2015年推出了第三代Mako智能骨科机器人系统,成功将Accolade及Trident系类假体结合在全髋关节置换应用。2016年成功的实施了Triathlon全膝关节置换手术后,标志着Mako智能骨科机器人系统在关节置换领域的应用的成熟,并充分显示出机器人手术的优势。下图给出了Mako骨科机器人的技术发展路线。
笔者从Mako手术机器人涉及的相关专利中择机选择了一组专利进行了解析,相关结果如下:
|
公开/公告号 |
CN102281831B |
申请日 |
2009-12-22 |
|
发明名称 |
一种用于机器人臂的传动装置 |
||
|
解决的技术问题 |
常规拉伸部件驱动系统的另一个困难是拉伸部件必须预拉伸以消除可能导致反冲的松弛。然而,预拉伸的加载量是拉伸部件的断裂长度的约15%至50%,这会导致向驱动系统组件、轴承和支撑结构施加较大的力。高的加载量还增加了驱动系统组件的摩擦力并且容易使外科医生疲劳。 |
||
|
技术方案 |
本发明公开了一种用于机器人臂的传动装置,包括:第一构件,所述第一构件具有驱动部件,和构造为被启动以抑制所述驱动部件运动的部分;第二构件;其中,所述第一构件和所述第二构件之一包括从动部件;以及第一和第二传动部件,所述第一和第二传动部件均与所述驱动部件和所述第二构件耦合,并且构造为在所述驱动部件运动时使所述从动部件随之运动,其中,所述第一和第二传动部件中的至少一个传动部件包括第一多元传动子部件,其中,所述驱动部件的旋转轴线平行于所述从动部件的旋转轴线,以及其中,所述第一多元传动子部件包括第一和第二传动子部件,并且所述驱动部件包括第一和第二引导件,所述第一和第二引导件构造为使所述第一和第二传动子部件相对于所述驱动部件定位。 |
||
|
相关附图 |
|
||
美敦力-MAZOR
2021年8月29日,美敦力宣布旗下脊柱外科智能导航机器人MAZOR X在中国正式上市,这款脊柱外科智能导航机器人在精准、安全、高效三大维度均实现了突破,立刻引起了业内的广泛关注,有望打造国内骨科新格局。
MAZOR系列手术机器人共经历的三代进化,其中MAZOR X手术机器人为最新一代产品,其首次实现了脊柱手术的全程可视化操作,医生可以借此看到此前无法触及的细节。术前基于解剖识别引擎的全局术前规划功能,在术前轻松完成手术方案设计,让术者对手术胸有成竹。术中借助MAZORX机械臂精准定位及零导丝高效置钉流程,让原本复杂费力的手术过程变得游刃有余,举重若轻。借助MAZOR X全程可视化导航,让术者摆脱辐射暴露的风险和繁琐的透视操作,置钉结果一目了然,确保手术全程可视。
Mazor机器人的发展已逾20年,总共经历了三次技术更新迭代,分别如下:
第一代:为诞生于2004年的SpineAssist,第一代MAZOR脊柱机器人SpineAssit于2004年获得CE&FDA认证,标志着机器人脊柱手术的开端。SpineAssist率先提出利用术前CT影像规划的机器人脊柱手术流程。即采用超前的解剖洞察引擎技术,利用术前CT影像进行手术规划,并于术中通过跨模态影像融合技术将术前手术计划与实际病人体位的骨性结构匹配,以机械臂精准执行手术。这项MAZOR核心科技显著地提升了手术的预见性与精准性,并一直沿用在之后推出的MAZOR机器人上。
第二代:为诞生于2011年的Renaissance,进一步完善了术前智能手术规划功能,全局化规划脊柱手术各个关键步骤。在硬件上,Renaissance首次推出一体式患者随动平台技术,将机械臂与患者骨性结构刚性连接,提升了操作与定位的双重精确性。在适应症上,丰富的操作平台选择覆盖全脊柱手术应用。
第三代:为诞生于2017年的MAZOR X,其在术前智能手术规划功能上实现全面突破,具体包括如下方面:置钉设计、置棒设计、皮肤切口设计、脊柱立线测量、M侧弯分型、植入物选择、截骨矫形、融合计划、术前手术报告等,MAZOR X将以上各个步骤进行全局化手术方案设计。同时在硬件上搭载第三代亚毫米级手术机械臂系统,真正实现脊柱手术的“所思即所见,所见即所得”。
同样的,笔者从Mazor手术机器人涉及的相关专利中择机选择了一组专利进行了解析,相关结果如下:
|
公开/公告号 |
CN102300512B |
申请日 |
2009-12-01 |
|
发明名称 |
机器人引导的倾斜脊柱稳定化 |
||
|
解决的技术问题 |
可以通过使用机械手沿安全轨迹引导外科医生以最小侵入的方式通过两个穿刺切口执行轨迹钻孔,比某些先前描述的使用倾斜轨迹的方法具有更小的创伤,还排除了对许多用荧光镜检查的图像来核查钻头插入位置相对于围绕患者的椎骨的神经位置的需要。 |
||
|
技术方案 |
一种用于准备患者的两个相邻椎骨之间的脊柱稳定化过程的系统,所述系统包括: 外科手术机器人,其被安装成,该外科手术机器人可以限定至少一个路径,该路径用于从所述两个相邻椎骨中的下面一个的椎弓根部位朝着上椎体的前部皮质边缘进入相邻的上椎骨的本体中的倾斜螺钉插入; 控制系统,其接收三维的手术前数据,包括关于所述两个相邻椎骨的骨骼结构的空间位置和神经位置的信息,以及 配准系统,其使所述外科手术机器人的坐标系与所述三维的手术前数据相关, 其中所述控制系统适合于使用所述信息来确定所述倾斜螺钉插入的安全路径。 |
||
|
相关附图 |
|
||
03血管介入手术机器人
血管介入手术机器人用于治疗心脏、脑部或外周血管系统中的血管或相关器官疾病,机器人辅助泛血管手术的显著优势是机器人可使外科医生免受过度X光辐射。
根据Frost & Sullivan数据,2020年全球进行的泛血管手术数量达1,430万例,2020年全球泛血管手术机器人市场规模为3,140万美元,预计2026年将增长至16.1亿美元,2016-2026年复合增长率为87.4%。随着冠脉、外周等血管疾病的患病率日益增长,泛血管手术机器人的产品性能逐渐提升,手术机器人辅助泛血管手术操作的渗透率将快速提升。
目前,也有多家手术机器人厂商布局血管介入手术机器人赛道,如:西门子Corindus途灵、Robocath(微创引入)R-one、Stereotaxis的Genesis RMN、唯迈医疗、奥朋医疗、爱博医疗等均具有较高的影响力。
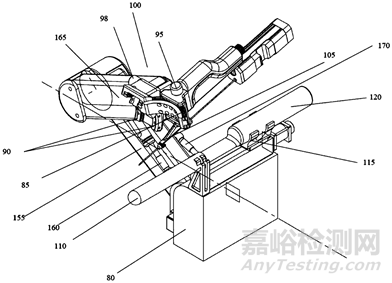
本文以西门子的Corindus途灵手术机器人系统为例,对血管介入手术机器人展开简单的专利分析。
西门子 途灵
Corindus途灵介入手术机器人技术起源于以色列,以色列海法医院成功研制出用于心血管介入的手术机器人Remote navigation system(RNS),该系统采用多组摩擦轮分别递送导引导丝和球囊支架导管,并首次开展了临床实验。2012年美国医疗机器人公司Corindus Vascular Robotics使用RNS技术开发的初代产品Corpath200获得了FDA批准上市用于PCI,又于2016年第四季度Corindus的二代产品CorPath®获得了FDA批准上市用于PCI。
值得注意的是,2019年8月8日,西门子医疗宣布以11亿美元收购Corindus Vascular Robotics,Corindus途灵介入手术机器人至此纳入西门子医疗旗下。
特别指出的是,西门子医疗的Corindus途灵最新一代CorPath GRX介入手术机器人还通过国家药监局器审中心的创新医疗器械特别审查申请,获准进入特别审查程序。
笔者从Corindus途灵介入手术机器人涉及的相关专利中择机选择了一组专利进行了解析,相关结果如下:
|
公开/公告号 |
US8828021B2 |
申请日 |
2009-11-25 |
|
发明名称 |
Catheter system |
||
|
解决的技术问题 |
Before performing an interventional procedure with the disclosed invention, a diagnostic procedure is typically performed. An exemplary diagnostic procedure performed before performing a PCI may include a number of steps. Starting in the femoral artery, a 0.038 guide wire is run over the top of the aortic arch. A diagnostic catheter is advanced over the 0.038 guide wire after which the 0.038 guide wire is removed allowing the diagnostic catheter (DC) to return to its preformed shape enabling the DC to access either the left or the right ostium of the aorta. A contrast media is injected through the DC and the heart is x-rayed to identify the existence and location of any lesion. A y-connector may be secured to the end of the DC outside of the patient. The y-connector provides a means for introducing the contrast media or medication. The y-connector employs a one way valve both at the y-connector leg and the free open end. The 0.038 guide is then reinserted into the DC advanced over the top of the aortic arch, and the diagnostic catheter is removed. When the diagnostic is completed the 0.038 guide wire may be left in place for use in a PCI procedure. |
||
|
技术方案 |
A robotic catheter system is provided. The catheter system includes a housing, and the housing has a sidewall and a longitudinal axis. The catheter system includes a recess formed in the sidewall of the housing and a drive mechanism supported by the housing. The drive mechanism is configured to impart movement to a catheter device. The catheter system includes a first channel configured to receive a catheter device, and the first channel has a opening located within the recess. |
||
|
相关附图 |
|
||
04经自然腔道手术机器人
经自然腔道手术机器人是指通过人体自然腔道,如支气管、胃、肠道、泌尿生殖系统等途径进入目标位置,并可进行手术操作的机器人。经自然腔道手术机器人应用于自然腔道腔镜手术,如支气管镜检查(肺检查)、结肠镜检查(肠道检查)及胃镜检查(胃检查)。经自然腔道手术机器人为目标部位提供了更清晰的视野,使外科医生能够更灵巧地操作工具。
根据Frost & Sullivan数据,2020年全球经自然腔道手术机器人市场规模为7,560万美元,预计到2026将增长至17.9亿美元,2016-2026年复合增长率为88.2%。日后随着自然腔道手术机器人在国内获批上市,新安装的经自然腔道手术机器人数量未来将快速增长。
目前,也有多家手术机器人厂商布局经自然腔道手术机器人赛道,如:intuitive Surgical开发的Ion支气管机器人、Johnson & Johnson开发的Monarch支气管机器人、MedRobotics开发的Flex消化道机器人、堃博医疗等均具有较高的影响力。
本文以intuitive Surgical开发的Ion支气管机器人系统为例,对经自然腔道手术机器人展开简单的专利分析。
直观外科 Ion
Ion是基于导管可以对肺内深处的组织进行精确穿透和取样的机器人肺活检系统。其生产厂家为Intuitive Surgical(直观外科),于2019 年 2 月获得FDA批准。
Ion腔内系统是一种新的机器人平台,用于在外周肺深处进行微创活检。该系统具有超薄的人为控制的机器人导管,可让医生以前所未有的稳定性和精度进入难以触及的气道。Ion手术机器人的独特之处在于其创新的形状感应技术,每秒可测量导管的完整形状数百次,从而在整个导航和活检过程中提供精确的位置和形状信息。
Ion手术机器人的包括一个采用形状传感技术的柔性导管,它提供位置和形状反馈以及一个视频探头,用于在驱动导管时进行实时可视化,导管可以在任何方向旋转和弯曲180度。活检针是柔韧的,因此可以穿过导管可以穿过的相同弯曲的解剖结构。
在支气管镜检查期间,使用Ion手术机器人的控制器沿着预先计划的路径导航到目标,借助Ion手术机器人的导管可以深入肺部。该导管具有 3.5 毫米的外径和 2.0 毫米的工作通道,使其到达肺的所有 18 个部位。
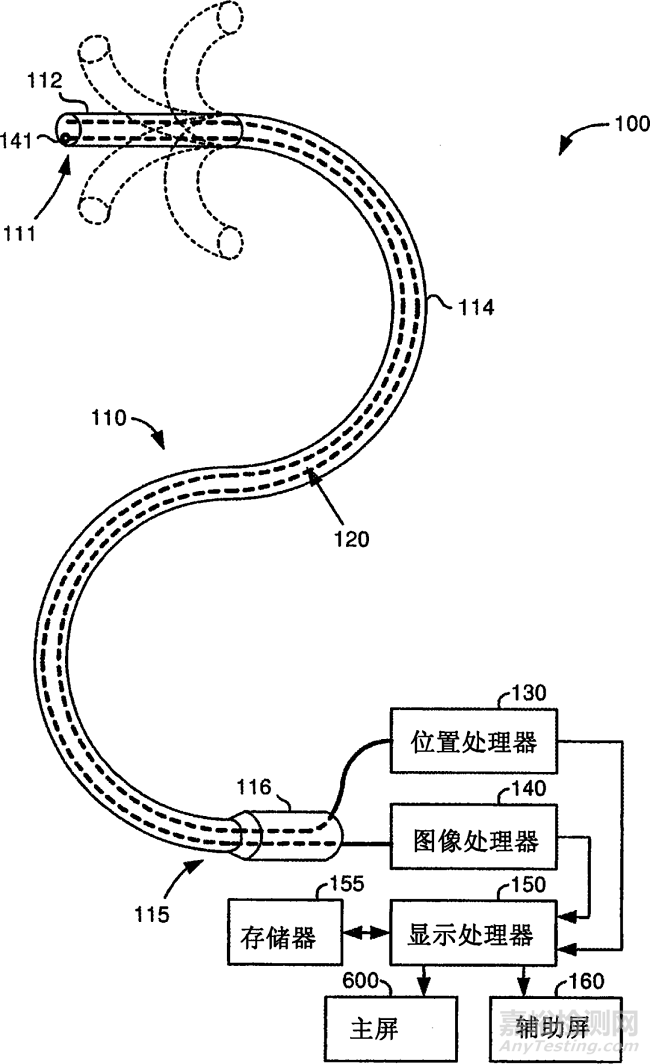
笔者从Ion手术机器人涉及的相关专利中择机选择了一组专利进行了解析,相关结果如下:
|
公开/公告号 |
CN102449666B |
申请日 |
2010-03-17 |
|
发明名称 |
用于为操纵内窥镜设备的末端朝向一个或更多个界标转向提供视觉引导和在内窥镜导航中辅助操作者的系统 |
||
|
解决的技术问题 |
如果操作者意外地在错误的方向移动内窥镜,则末端可能无意地穿孔或者损害组织,这对病人引起伤害。即使这种伤害通过小心地移动内窥镜末端来避免,也需要额外的时间来重复地确定内窥镜相对于病人体内的目标位置的真正方向。因此,实施手术程序所需的时间被延长,这增加了手术的成本并且增加了对健康安全的忧虑。 |
||
|
技术方案 |
通过将向量的图形表示显示在当前图像附近来为内窥镜设备的操作者提供界标方向引导,所述当前图像由设置在内窥镜设备的末端处的图像捕获设备捕获并被显示在显示屏上,其中所述向量的图形表示指向将操纵内窥镜的方向以朝例如解剖结构的相关界标移动。通过确定内窥镜设备相对于参考系的当前位置和形状、根据确定的位置和形状产生内窥镜计算机模型,并与参考至参考系的病人计算机模型一起显示内窥镜计算机模型以便当操纵内窥镜时操作者可以看见,来为操作者提供视觉导航。 |
||
|
相关附图 |
|
||
05穿刺手术机器人
经皮穿刺手术机器人是一种通过MRI、CT、超声等成像手段将目标解剖位置定位,引导反馈枕头达到病灶,辅助完成经皮穿刺的手术机器人。经皮穿刺手术机器人适用于经皮穿刺手术,其主要为收集组织样本作诊断用途的程序,如检测早期肺癌、乳腺癌及前列腺癌。
根据Frost & Sullivan数据,全球经皮穿刺手术机器人2020年市场规模为3.8亿美元,预计到2026年增长至14.9亿美元,2016-2026年复合增长率为22.5%。
同样的,目前,也有多家手术机器人厂商布局经自然腔道手术机器人赛道,如:Perfint Healthcare的Robio EX和MAXIO V2、Veran的ig4、Biobot的Mona Lisa、XACT Robotics的XACT ACE、医达健康的IQQA-Guide等均具有较高的影响力。
本文以Biobot的Mona Lisa前列腺穿刺手术机器人系统为例,对穿刺手术机器人展开简单的专利分析。
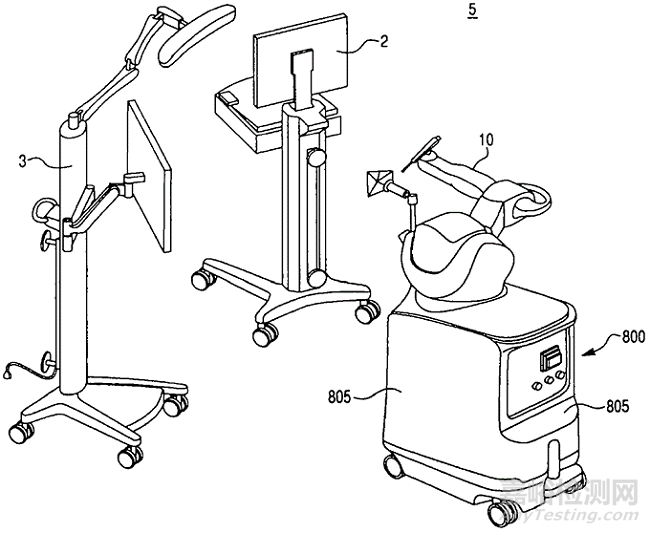
Biobot Mona Lisa
Mona Lisa手术机器人是一种前列腺辅助穿刺机器人,由新加坡biobot surgical公司研发,该手术机器人由微创医疗引入国内。
Mona Lisa是在经皮穿刺这一赛道布局的一款创新机器人产品。Mona Lisa可使医生能够更加精确、轻松地进行活检取样:术前,医生可以通过智慧的软体进行手术规划和交互调整;术中,强大的弹性MRI-超声融合演算法可即时引导医生,使得目标靶点无论位于前列腺尖部、基底部或外周带,都能容易且准确地被取样。创新的经会阴两点式入针法可以最大限度地减少耻骨弓的干扰、减少患者创口,并实现完全的前列腺覆盖;术后,Mona Lisa可生成包含 3D图像和临床资料的完整报告。
笔者从Mona Lisa手术机器人涉及的相关专利中择机选择了一组专利进行了解析,相关结果如下:
|
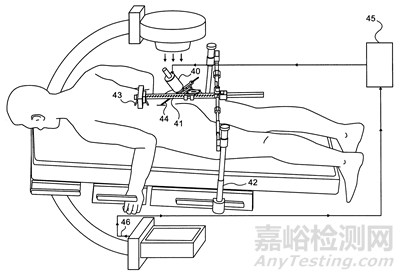
公开/公告号 |
CN102449666B |
申请日 |
2010-03-17 |
|
发明名称 |
用于为操纵内窥镜设备的末端朝向一个或更多个界标转向提供视觉引导和在内窥镜导航中辅助操作者的系统 |
||
|
解决的技术问题 |
如果操作者意外地在错误的方向移动内窥镜,则末端可能无意地穿孔或者损害组织,这对病人引起伤害。即使这种伤害通过小心地移动内窥镜末端来避免,也需要额外的时间来重复地确定内窥镜相对于病人体内的目标位置的真正方向。因此,实施手术程序所需的时间被延长,这增加了手术的成本并且增加了对健康安全的忧虑。 |
||
|
技术方案 |
通过将向量的图形表示显示在当前图像附近来为内窥镜设备的操作者提供界标方向引导,所述当前图像由设置在内窥镜设备的末端处的图像捕获设备捕获并被显示在显示屏上,其中所述向量的图形表示指向将操纵内窥镜的方向以朝例如解剖结构的相关界标移动。通过确定内窥镜设备相对于参考系的当前位置和形状、根据确定的位置和形状产生内窥镜计算机模型,并与参考至参考系的病人计算机模型一起显示内窥镜计算机模型以便当操纵内窥镜时操作者可以看见,来为操作者提供视觉导航。 |
||
|
相关附图 |
|
||
结 语
诚如领域内人士共同认识的那样,手术机器人逐渐赢得市场追捧,站上了智能精细化发展、医保政策利好的快车道,全球以及国内各大手术机器人厂商也必会将达芬奇等先进机器人作为重要的标杆和对照,联动产学研医生多方力量,不断创新,推动中国手术机器人行业更智能化、精准化、微创化的发展,相关知识产权问题也必将会成为各大手术机器人厂商的研究重点课题,后续相关产品的的研发和专利事务值得持续关注。
来源:医械知识产权