前言导读
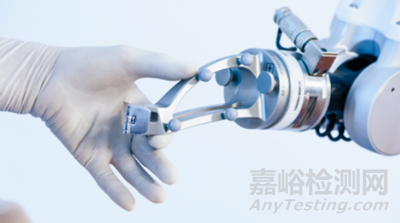
心脑血管疾病具有高发病率、致残率、复发率特点,血管腔内介入治疗具有关键作用。但心脑血管解剖结构比外周血管更为复杂,手术难度更大,因此介入手术时间较长,手术医师承受的压力与职业健康损害随之升高。此外,介入手术对精确度、安全度有较高要求,手术医师培养周期较长,与巨大且快速增加的医疗需求不呈正比,间接提升了从事心脑血管疾病介入治疗的门槛,不利于心脑血管疾病介入治疗的发展和完善。为解决传统介入手术的不足,介入机器人辅助治疗技术应运而生,手术医师应用机器人辅助开展介入手术,在手术室外即可对导丝和导管进行操纵,不仅可有效减少手术医师在X线辐射中暴露,还降低工作强度,提高手术精确度。
介入机器人行业解读
介入放射学作为一门相对较新的具有微创性质的专业,正在迅速发展。尽管机器人系统在这一领域的应用显示出巨大的前景,如提高精度、准确性和安全性,以及降低辐射剂量和远程操作程序的潜力,但这些技术的进展一直很缓慢。
介入放射学(IR)是最具创新性和创造性的学科之一,在成像技术、导管和设备以及治疗程序方面有着快速的发展。尽管如此,在机器人方面,IR一直落后于其他专业。达芬奇机器人于1997年在比利时首次用于腹腔镜胆囊切除术,自1999年以来已被广泛使用,尤其是在外科、泌尿外科和眼科。自2000年以来,整形外科医生一直在使用机器人辅助的假体植入。介入血管造影机器人最初被发明用于心脏介入,随后过渡到外周介入领域。
在IR领域,介入机器人系统旨在提高手术的准确性和安全性,患者的治疗成功率性和舒适性,同时最小化操作人员的技能可变性,减少患者和临床医生的辐射暴露。此外,鉴于这些系统的远程操作性质,医疗水平不高地区的患者可以从这些技术中获得好处。机器人技术在非血管IR手术中的应用提高了经皮手术精度,同时增强了对预定义目标路径的依从性。
据弗若斯特沙利文数据,2020年全球手术机器人市场规模达83.2亿美元,其中腔镜机器人和骨科机器人的技术与市场已较为成熟,分别占据52.5亿美元和13.9亿美元的市场规模。相比之下,血管介入机器人则属于新兴领域,比如美国血管介入领域的机器人手术渗透率也仅为0.5%左右。虽刚刚开始,但基于庞大的市场需求,我国血管介入手术机器人的市场规模将从2022年的0.34亿元增长至2030的58.24亿元,复合年增长率为90.3%。
血管介入机器人临床优势
血管介入手术,是指在DSA等影像设备的引导下,利用穿刺针、导丝、导管等器械经血管进行诊断与治疗的技术。该手术有创伤小、恢复快、精准治疗的特点,在部分领域已经取代外科手术成为首选治疗方式。
传统介血管介入手术,存在几个明显问题:
1)医护人员需要长期暴露在X射线下,必须身着重达10多公斤的铅衣,被誉为 “铅衣战神”,但依然受到大量辐射伤害;
2)血管介入手术要求高,操作难度大,学习曲线长,约5-10年出师;
3)手术量大,仅经皮冠状动脉介入治疗,即PCI手术量,在2020年已达到140万台,年增长10-15%,医护疲劳,增加手术风险;
4)疑难血管病例手术时间长,并发症易发。
针对以上痛点,血管介入机器人应运而生。
大多数血管机器人,通常由推进装置系统、操作,装置、定位机械臂等三部分组成。医生通过操作台上的摇杆或是操作按钮,控制推进装置,实现对手术室内定位机械臂上导管导丝前进、后退、旋进、方向变化、快慢等控制,从而完成球囊扩张、支架释放等手术流程。
血管介入机器人构成与原理(来自西门子官网)
血管介入手术机器人的出现,让介入医生实现隔室操作,摆脱铅衣负担,具有以下优势:
1)射线防护。实验证明介入机器人可减少医生90%辐射,减少患者20%辐射;
2)精准操作,手术效率高,减少并发症。利用图像导航和操作端的辅助操作,精准定位病变,优化器械输送路径,缩短手术时间,减少手术并发症;
3)医患隔离,较少交叉感染。机器人可以远程完成手术,减少传染性疾病的传播;
4)手术标准化,学习周期短,解决介入医生匮乏的现状;
5)远程手术可实现优质医疗资源下沉,解决医疗资源不均衡问题。
技术的最新进展使机器人辅助血管内和非血管介入手术的得到改进。IR中的机器人系统可以解决该领域很多的缺点,即患者和医护人员都暴露在电离辐射中(图A)。此外,在IR中使用机器人系统的其他潜在好处包括提高治疗精度,减少操作时间,以及减少达到目标所需的重新调整次数。
最终,随着远程控制机器人系统的进一步进步,机器人辅助IR可能会改善医疗服务,尤其是在医疗欠发达地区。与手术模拟器相结合,机器人系统可以作为未来的潜在介入手术培训工具,在最大限度地减少辐射暴露的情况下,实现高度真实的训练场景。类似地,机器人系统的使用可能会在未来的介入治疗中最大限度地减少介入医生操作的可变性。然而,仍有许多缺点需要解决,以使该技术在IR领域得到广泛采用。其中一些限制包括这些机器人的高成本、无法将一些机器人系统与其他手术设备和/或器械集成、对IR套件中的工作流程的干扰以及缺乏触觉反馈。人工智能在机器人手术中的应用在改善手术参数方面显示出了一定的前景,如改善触觉反馈系统和手术指导,以及更好地预测手术时间和术后结果。
医疗器械产品解析
1、Sensei Magellan H
Hansen Medical Inc
Hansen Medical成立于2002年9月,总部位于美国加州,是一家医疗用导管机器人科技公司,2005年,Hansen收购从麻省理工学院的人工智能实验室和波士顿大学医学中心手术科独立出来的医疗机器人公司——EndoVia Medical Inc.公司制造了机器人手术系统和手术过程所使用的导丝、导管、护套、气球、支架等工具,产品包括可进行心血管手术的Sensei机器人导管系统、进行周围血管手术的Magellan机器人系统、Artisan操控导管等。
Sensei
与“达芬奇”不同的是,重点产品Sensei机器人手术系统专注于更细致的一些领域,例如从手臂或大腿的大血管切开小口,用导管导入手术工具,来做血液循环方面的手术等。
Sensei (Hansen Medical, Mountain View, CA, USA)是首批商用机器人系统之一,于2007年获得美国食品和药物管理局(FDA)批准,用于心脏测绘和消融手术。该系统使机器人能够使用3自由度(DOF)操纵杆远程控制可操纵导尿管。与手工操作相比,Sensei提供了更好的导管稳定性,并成功地用于心脏消融和血管内动脉瘤修复。Hansen Medical的下一代机器人平台是Magellan机器人系统,该系统在2012年获得了FDA 510(k)许可,允许介入放射科医生远程控制6Fr、9Fr和10Fr机器人导管的远端同轴尖端的形状和运动,以及机器人操作标准的现成导丝。机器人能够控制0.03500和0.01800线的运动,操作者可以通过机器人控制站上的按钮进行线的前进、收缩、360度旋转和停放。这一开创性的机器人系统已经在一些外周动脉介入治疗中显示出其有效性和安全性,如主动脉支架移植、开窗血管内动脉瘤修复(FEVAR)和栓塞技术。
SENSEI是欧洲医院系统首个商用的机器人伽玛探针,用于术中检测前哨淋巴结以及通过淋巴系统的癌症转移。这项技术有望实现更精确、更具针对性的癌症手术,适用于肺癌、结直肠癌、胃癌、妇科和前列腺癌等多种主要癌症类型。
SENSEI®是一种先进的导航系统,微型探头具有很强的灵活性,扩大了视野,能够快速定位放射性热点。适用于微创和机器人辅助癌症手术。
SENSEI®优势:
1.长度缩小到40毫米以上:一次性探头尺寸仅超过40mm,是腔内手动和机器人腹腔镜手术的理想选择。连接在一根3米的轻型电缆上,探针可以通过一个标准的12毫米入口轻松取出。
2.易于使用:与顶尖外科医生和核医学医师紧密合作设计。该系统易于在手术室使用,具有清晰的声音和图形显示。SENSEI®可与外科机器人平台上的外部显示器集成。
3.一次性探头:SENSEI®探头是一次性的,不需要无菌护套,也不需要在两个手术之间进行再处理,消除了交叉污染的风险和因丢失或损坏而产生的成本。
4.腔内灵巧:当与一个铰接抓取器一起使用时,这种微型探针允许无与伦比的腔内操作性和灵活性。
5.完全旋转:通过多夹点定位,探头可以在手术区域内提供六个自由度,到达所有感兴趣的区域。
Magellan H
2012年,Hansen Medical推出了手术机器人Magellan
Magellan系统由控制台、床边控制面板、远程导丝控制器、远程导管控制器4部分组成,通过对传统导管结构进行改造,其可更精确地控制导管尖端移动,在脑血管病介入手术过程中经颅多普勒记录的血管壁撞击次数显著降低,减少了对血管内皮的损伤。
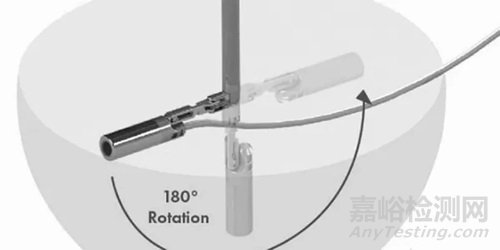
Magellan使用了Hansen自研的蛇形可扭转头部导管,丝绳机构可以让导管头部达到180度的弯曲(9Fr产品),这种大胆的设计即使在今天也是让人惊奇的。一般介入器械在弯曲的血管内会因为柔性,按照血管的形状依附在血管壁上,但是在脆弱的血管中,这种被动的弯曲和持续的摩擦可能会导致血管壁的撕裂。而Magellan的导管可以主动扭转,避免跟血管壁的大量接触,并且弯曲后的导管可以给导丝提供优异的支撑。
一般来说,手术机器人的研发要么是对准了一个临床刚需,或者在用户使用中逐渐发现了更好的临床需求(比如达芬奇)。遗憾的是,Magellan系统似乎没有什么好运,它主要的应用场景,是在外周血管,如腹主动脉、主动脉、颈动脉修复过程中,为导丝提供更快的介入和支撑。2016年Hansen被Auris Medical收购以后,因为市场定位及需求的问题,Magellan就逐渐消失了。
2、CorPath GRX
Corindus
Corindus是西门子旗下子公司,也是机器人辅助血管介入的全球技术领导者。其产品的CorPath是一种血管介入机器人,可为经皮冠状动脉和血管手术带来机器人精度。其致力于开发创新的机器人解决方案,通过为世界各地的患者提供专业及时的医疗护理,彻底改变紧急情况的治疗。
CorPath GRX是首款经FDA批准并经CE认证的经皮冠状动脉和血管手术手术机器人。CorPath GRX在神经介入领域应用也获得CE批准。
CorPath GRX系统主要应用于心血管及外周血管的介入治疗,经过设备升级与改造后逐渐推广用于治疗解剖结构更加迂曲、狭窄的脑血管疾病。该系统由线性运动操作系统和旋转运动操作系统组成,可在术中精准控制导丝、导管及球囊与支架输送,并实现30°旋转,以便操作时更准确地控制导管(操作精度可达1mm),将导丝和导管保持在血管腔中心,减少对血管壁的损伤。
CorPath GRX主要由两大部分构成:床旁操作单元和手术控制单元。
床旁操作单元:
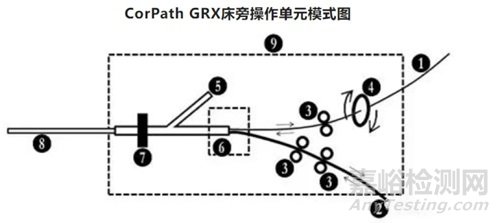
床旁操作单元为模块化设计,由安装在手术床护栏上的可灵活移动的机械臂和一次性操控盒组成。操作盒与机械臂末端的驱动连接口相连,盒内的动力装置分别操控指引导管、指引导丝,球囊或支架,接收指令完成推送、牵拉和旋转动作,细微动作可以精确到1mm。
1.机械臂, 2. 驱动接口,3.指引导丝,4.球囊或支架(尾端接压力泵接口),5.推送装置,6.旋转装置,7. Y型阀侧孔(监测压力和注射造影剂),8. Y型阀,9. Y型阀旋转器,10.指引导管推送器,11. 指引导管夹持器,12.指引导管,13一次性操控盒
手术控制单元
CorPath GRX的手术控制单元为移动工作站式的铅防护工作舱,不仅可以将手术控制单元放置在手术区域的任何地方或DSA控制间,而且还可以使介入医生不需要穿着铅衣,坐在射线屏蔽良好的工作舱内遥控完成手术。手术控制单元采用触摸屏控制台和两个操纵杆对手术器械和DSA设备进行操控,控制舱内配有压力泵接口和造影剂注射系统,另外,工作舱内监视器可以实时查看手术录像、心电监护、血流动力学参数。
3、R-One
Robocath
Robocath是一家法国公司,于2009年由Philippe Bencteux博士成立,负责设计、开发血管介入手术机器人。
2023年5月17日—Robocath是一家设计、开发和商业化治疗心血管疾病的智能机器人解决方案的公司,宣布推出其最新的机器人平台—R-One+。
obocath开发机器人解决方案,集成了独特的仿生技术,优化了机器人辅助冠状动脉成形术的安全性。这种医疗程序包括通过将一个或多个植入物(支架)插入供血的动脉来使心肌血管重建。Robocath的机器人解决方案旨在精确操作并执行准确的运动,创造更好的干预条件。由于其开放的架构,它们都与市场领先的设备和cathlabs兼容。
R-One+™由两个核心元素组成:
-指挥单元,可以定位在cathlab(与移动辐射防护屏幕相结合)或控制室中
-机器人单元:包括机器人及其铰接支撑臂。
2023年12月,上海微创医疗机器人和法国Robocath S.A.S联合在华成立的合资公司知脉(上海)机器人有限公司旗下R-ONE®血管介入手术机器人正式获得国家药品监督管理局(NMPA)上市批准。这是首个在国内完成多中心临床试验并获批的商业化冠脉血管介入手术机器人,填补了我国PCI手术机器人领域的空白。
4、Niobe ES
Stereotaxis
Stereotaxis成立于1990年,是电生理创新机器人技术的全球领导者,致力于为介入导管室提供可应用于电生理等介入手术的机器人系统及配套解决方案,帮助医生为患者提供更高精确度和安全性的手术治疗,并提高导管室手术效率以及加强手术信息的整合。Stereotaxis于2003年推出了全球首个磁导航电生理机器人Niobe,升级版Genesis RMN系统于2020年获得了美国FDA上市批准。
Niobe ES是一种商用磁力驱动机器人平台,可在3个自由维度内实现磁场导航和重新定位磁性导管。磁性导管由柔软材料制成,以避免过度的接触力,并降低心脏穿孔的风险。Niobe的主要缺点与它独特的导管相关、大约30分钟的相对较长的设置时间以及放置设备需要较大的空间有关。
Niobe ES由手术台旁边的两个机器人控制的磁体组成。在手术过程中,医生使用直观的计算机界面来调整患者周围的磁场。允许医生精确地引导和操纵在其尖端嵌入有磁体的导管。从而可以帮助医生在进行心脏手术时更加精准地操纵导管,该系统具有更快的导管操作速度和更高的精度,可以显著提高手术的效率和安全性。
2020年,Stereotaxis推出了Genesis,这是Niobe系统的更新版本,它采用了一种新颖的设计,减少了机器人的尺寸、重量,并实现了更快、更灵活的磁力运动。
5、Amigo
Catheter Precision
Catheter Precision, Inc.(前身Ra Medical Systems, Inc.)于2018年7月在特拉华州注册成立,之前于2002年9月4日在加利福尼亚州注册成立。该公司是一家商业级医疗设备公司,利用他们先进的准分子激光平台,用于治疗血管和皮肤病。
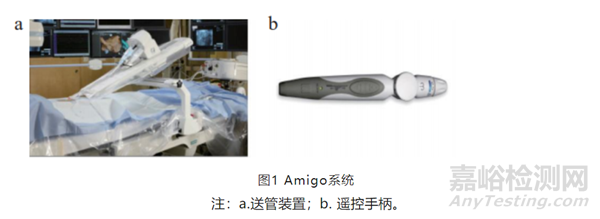
Amigo用于血管介入电生理治疗的远程导管系统。Amigo系统由一个安装在电生理台上的送管装置和一个有线控制器组成 。Amigo不需要单独的工作站,可以与现有的透视技术结合确定导管位置并通过控制器操作导管。Amigo是一个开放式平台,能够兼容现有的商用导管,降低了使用成本。导管被放置在扩展底座内,介入医生可以通过控制器在30m外进行控制。控制器可以实现导管插入、回撤和旋转以及导管顶端偏转。通过控制器的前进、后退按钮可以控制滑轨的前进和后退,从而实现导管的插入与回撤,导管运动速度为每秒13mm,最小控制精度为1.6mm。介入医生旋转控制器的最前端旋钮实现转台的旋转,带动导管进行 360° 旋转。旋转控制器中间的旋钮可以实现导管的远端弯曲
Amigo远程导管系统的设计目的是为心脏电生理手术中的远程导管操作提供一种简单且成本较低的解决方案。Amigo得益于作为控制面板的手持远程设备以及与现成消融导管的兼容性。由于该系统是专门为心脏电生理治疗而设计的,因此在PCI或PVI中的潜在临床应用有限。
6、AcuBot
Hopkins/Georgetown, USA
最早兼容ct的机器人系统之一是AcuBot (美国乔治敦约翰斯·霍普金斯大学URobotics实验室)。fda批准的AcuBot建立在之前的PAKY-RCM机器人系统的基础上,并通过添加几个新组件进行了改进,包括被动s臂和XYZ笛卡尔工作台。该机器人具有6自由度,设计用于解耦定位、定向和仪器插入。
该机器人系统已在一项神经和关节突块的尸体研究中进行了测试,平均放置精度为1.44±0.66 mm(平均值±SD)。AcuBot系统与预定目标的平均平移偏移量为1.2 mm(范围0.39-2.82 mm),导航系统为5.8 mm(范围1.8-11.9 mm)。AcuBot达到目标的平均时间为37秒(15-75秒),而导航系统为108秒(45-315秒)。
Acubot于2005年通过FDA认证,同年一项20例神经阻滞术随机对照试验表明,机器人和传统徒手法的平均偏差分别为1.105 mm和1.238 mm。虽然Acubot机器人最终并未能成功进入商业化,其公司也未继续将其应用于脊柱外科领域的研究,但其作为首个基于主动导航系统的脊柱外科机器人,为后续脊柱外科机器人的研发带来了新的思路。
7、B-RobⅡ
Seibersdorf Research
奥地利塞伯斯多夫研究中心拥有8个实验室,这些实验室支持并实施能够满足成员国在一系列主题领域的发展需要的活动,开展应用研究和开发,向成员国提供培训和能力建设,并提供技术和分析服务。
B-Rob II机器人系统(奥地利研究小组ARC,奥地利塞伯斯多夫研究中心)是B-Rob I的继任者,具有7个自由维度,设计用于CT和超声(US)引导的活检采样。
第二代机器人的设计目标是创建一个灵活的设置设计,更适合临床实践,更容易与其他系统集成,同时降低技术复杂性和成本。使用明胶假体评估B-Rob II系统机器人针头放置的准确性,并进行了21次活检。平均置针精度为1.8±1.1 mm (mean±SD),平均手术时间为2 min。这个机器人系统被用于协助胎儿和婴儿的死后ct引导活检;然而,它提供的附加诊断价值有限。活检取样失败主要涉及CT软组织对比降低的器官,如脾脏,并且在腹部低脂肪和皮下脂肪的胎儿中评估这些器官通常是困难的。
8、Micromate
Interventional Systems
Interventional Systems(iSYS)公司总部位于奥地利的基茨比厄尔,公司致力于提供具有成本效益、更易负担、可扩展和多模式的机器人平台,以执行图像引导的外科手术,而不会影响患者安全和手术准确性。
Interventional Systems其机器人---Micromate全球已上市最小手术机器人。尽管Micromate非常小,但是其具备影像介入完成各类手术能力。
小巧使得Micromate成为唯一一个能随着影像设备运动而运动,并且实现实时监测 。它使复杂的手术变得简单可靠,整体手术时间缩短66%,同时患者辐射减少了84%,而且实现医生零辐射。
Micromate与其配合影像设备包括CT、B超、DSA等等。
9、Zerobot
Okayama University(日本冈山大学)
Zerobot(冈山大学设计;由Medicalnet Okayama制造的)是另一种远程控制机器人,专为需要穿刺的ct引导手术设计,如消融、活检和引流。Zerobot有一个操作界面,可以操纵机器人6自由度。机器人在幻影和动物实验中获得了准确、安全的结果。
从2020年6月开始,进行使用冈山大学开发的医疗用针穿刺机器人(Zerobot®)由医生主导的临床试验。在临床试验中,进行了术者和机器人的穿刺精度的比较,及使用机器人对癌症的治疗(消融)。使用这种穿刺机器人的临床试验在国内尚属首次。
Zerobot的开发是从2012年开始冈山大学通过医工合作进行的。2018年首次临床试验作为特定临床研究实施,10例全例机器人成功用针穿刺。
10、ROBIO EX
Perfint Healthcare
Perfint Healthcare是一家医疗设备公司,专注于在介入肿瘤领域开发智能解决方案。Perfint的旗舰产品PIGA CT是一种高科技医疗机器人定位设备,可帮助肺部、腹部和骨盆小肿瘤的活检、FNAC、药物输送、消融等临床应用。
印度Perfint 公司的ROBIO EX系统是CT和PET-CT引导的机器人定位系统,可以用于胸部腹部的介入治疗,帮助快速准确地靶向肿瘤和放置工具,具体应用包括组织活检,细针穿刺细胞学检查(FNAC),疼痛管理,引流和肿瘤消融。
ROBIO EX的机械臂具有5个自由度以及亚毫米和亚角度的精度。其中两个线性运动用于定位导向器,两个角度运动用于将针头修改为适当的角度入口,这确保了手术可以在不同的高度和位置进行。它还包括一个屏气管理系统,以保护可能因呼吸而移动的目标。Robino EX的一个主要缺点是,它固定在地板上的支架上,因此,每次移动CT台时,针头都必须分离。
ROBIO EX系统目前可支持手术类型:
1.活检/细针吸取细胞学检查(FANC):医生可通过CT扫描资料来计划穿刺路径,ROBIO导引系统可根据计划做出轨迹并辅助穿刺针的置放。
2.微创局部治疗:ROBIO EX系统可用于几种常用的消融手术的引导,如射频消融、冷冻消融等,ROBIO EX系统可根据计划轨迹对单探针消融术进行轨迹计划和辅助探针置放。
3.引流:ROBIO EX系统可引导抽吸针及引流管置于计划靶点位置;
4.疼痛治疗:ROBIO疼痛管理模块辅助进行计划,可放置多达2个针,以引导药物注射,阻滞疼痛神经传导。
此外,ROBIO EX还可用于碘125粒子植入、黄金基准标记物置放等其他使用单个和直形针或探针的介入手术,协助临床医生对肿瘤进行靶向定位,对诊断或治疗工具的精准置放进行计划。
11、Innomotion
Innomedic, RheinsheimPhilippsburg
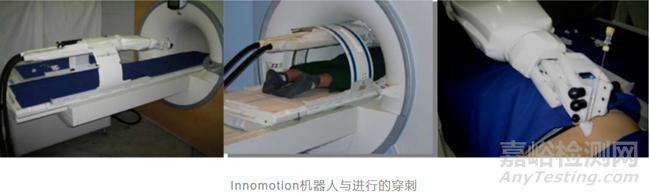
Innomotion是一款气动机器人,完全与磁共振兼容,可在磁共振内部提供精确的穿刺。该机器人有6个自由度,可以固定在核磁系统上。该装置经过优化,可用于狭小的磁共振和CT环境。最初的系统较为简单,仅可提供位置引导,即机器人向医生指示穿刺位点和针取向,不能进行实时引导和进针。后续系统进行了升级,增加自由度到7个,并改善了驱动方式。
MRI已逐渐成为介入手术中普遍选择的成像方式,主要是因为其出色的软组织对比度分辨率,缺乏电离辐射,以及多模态感知如血流、运动、变形、应变和温度的能力。然而,它有主要的缺点,包括成本,有限的孔空间,以及对兼容仪器的限制。Innomotion能同时兼容CT和MRI。第二代INNOMOTION机械臂有6个自由度,还有一个额外的被动旋转自由度用于预定位,其主要目标是在磁体内精确定位仪器。
12、EPIONE
Quantum Surgical
Quantum Surgical 成立于2017年,是由持续创业者、Medtech SA的创始人 Bertin Nahum 创立的手术机器人初创公司。该公司致力于开发适用于广泛医疗条件的端到端微创治疗解决方案,使医生能够更好地进行评估、规划和治疗。
Epione®是一种开放式的机器人穿刺手术导航定位解决方案,可兼容消融、活检、粒子植入等多种治疗方式。
该产品由智能机械臂手术台机、中央控制台、导航定位仪和手术工具组成,通过病灶智能识别、穿刺路径规划、机械臂辅助穿刺,协助术者在CT影像的引导下为硬直器械的穿刺路径进行规划,并根据规划提供稳定、精准、可重复的进针路径和位置引导,从而减少术中穿刺针调整次数,降低患者辐射剂量,减少并发症的发生率,避免“盲穿”面临的高难度、高风险等一系列问题,显著提高手术效率。
Epione是唯一一款为靶向腹部肿瘤消融时提供 6 个自由度和前所未有的灵巧性的介入肿瘤学机器人。
尤其对于肿瘤消融这一最为重要的应用,Epione®还能够为不同的消融技术(射频、微波、冷冻消融、不可逆电穿孔)提供直观、可视的消融效果术前预测和精准的消融范围术后确认,方便医生为患者制定最为合适且有效的治疗方案。
Epione®已分别于2021年和2022年获得欧盟CE认证和美国FDA上市批准
专利事务值得关注
随着手术机器人技术领域的竞争日益加剧,专利事务已经成为企业不可或缺的一部分。做好自身的专利布局,不仅可以保护企业的创新成果,还可以为企业在市场竞争中提供有力的法律支持。
首先,企业需要注重专利的申请和保护。在研发过程中,一旦有新的技术突破或创新点,就应及时申请专利,确保自身的技术成果得到法律保护。同时,企业还需要对已有的专利进行定期维护和管理,确保其有效性和稳定性。
其次,企业需要建立完善的专利预警机制。通过定期检索和分析相关领域的专利信息,企业可以及时了解技术发展趋势和竞争对手的动态,从而避免可能的专利侵权风险。一旦发现存在侵权风险,企业应迅速采取措施进行应对,如寻求专利许可、进行技术改进或调整市场策略等。
此外,企业还需要做好应对专利战的准备。在竞争激烈的市场环境中,专利战可能随时爆发。因此,企业需要提前制定应对策略,如建立专门的法务团队、储备充足的资金用于可能的专利诉讼等。同时,企业还可以通过与合作伙伴建立专利联盟、参与行业标准制定等方式来增强自身的专利实力和市场影响力。
在手术机器人这一赛道上,专利事务的复杂性和专业性要求极高,因此,寻找专注、高水平且聚焦此领域的专业人士和团队显得尤为重要。这样的团队不仅具备深厚的法律和技术背景,还能准确理解并把握手术机器人技术的核心要点和市场动态。他们的专业知识和经验将为企业带来准确、高效、高质且低成本的专利事务服务,助力企业在激烈的市场竞争中脱颖而出。
参考:搜狐网、Med TF、智慧医械、我爱瓣膜、创械圈,协和医学杂志,医械一线,医林研究院,时珍网,上海科技, 中国医疗设备,留学冈大,复旦大学附属肿瘤医院、动脉网、各大产品官网。