仿生肌肉纤维在外界刺激下能够产生类生物肌肉的收缩运动,作为一种新型的驱动器,有望推动仿生软体机器人、智能变翼飞行器、可穿戴及可植入医疗技术等方向的创新发展。螺旋仿生肌肉纤维凭借其独特的驱动放大结构可以输出优异的驱动性能。但在收缩前需要对螺旋仿生肌肉纤维施加张力将纤维相邻的螺环分开为其收缩提供空间,而且其回复过程也需要相同的应力将纤维拉回原长,这导致在一个驱动循环过程中螺旋仿生肌肉纤维的净做功为零。
针对上述问题,中科院苏州纳米所李清文、邸江涛研究员等报道了一种无预应力、可自回复并能高效循环做功的仿生肌肉纤维。该仿生肌肉纤维以碳纳米管(CNT)纤维的弹性螺旋结构驱动回复,并利用液晶弹性体(LCE)的可逆相变产生驱动形变。所获得的肌肉纤维表现出56.9%的可逆收缩量,1522%/s的收缩速率,7.03 kW kg−1的功率密度和32,000次的稳定循环。
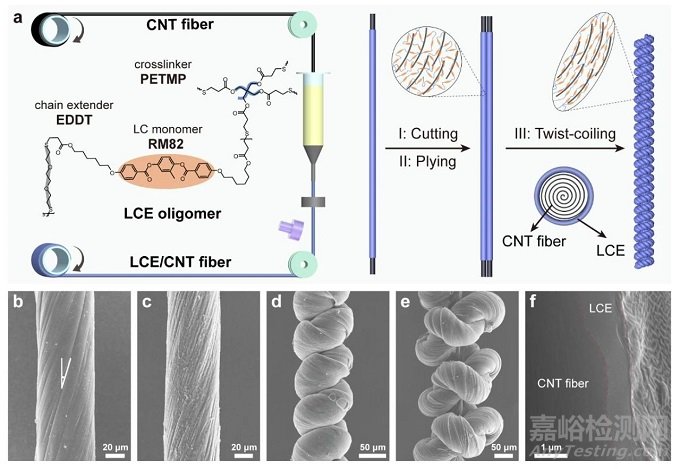
图1. LCE/CNT复合纤维的制备与表征
通过连续的浸渍涂覆固化技术实现了复合纤维的连续制备,随后进行并股加捻得到螺旋纤维。其中,CNT纤维表面的沟道初步诱导了液晶分子的排列,加捻进一步诱导液晶分子重排变为相对有序的状态,复合纤维在温度刺激下产生形变。(图1)
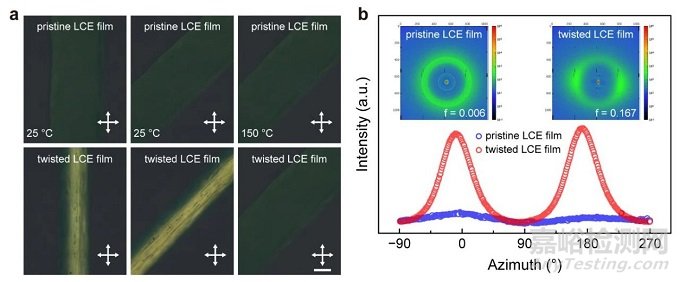
图2. 纤维的结构表征
经过加捻的复合纤维表面的LCE从无序变为有序,偏光显微镜和WAXS的结果都证明了这一点,加捻后LCE的取向变好,取向因子增加,表明螺旋应力有效诱导了液晶分子的排列(图2)。
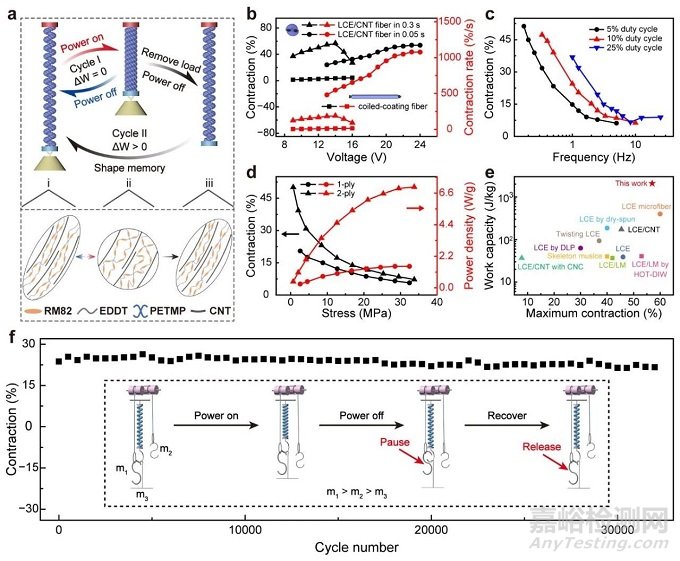
图3. LCE/CNT螺旋纤维的电热驱动性能
目前文献中报道的仿生肌肉纤维在收缩和恢复过程中都需要施加恒应力(图3a,循环Ⅰ),整个过程纤维的净做功为零。本工作开发的纤维在通电时收缩提起负载,断电后无需负载回复到原长(图3a,循环Ⅱ),纤维的净做功大于零。该有效做功特性对于仿生肌肉纤维的应用具有重要意义。对复合纤维加捻使得LCE在CNT沟槽中沿着CNT取向形成液晶态。在电热的作用下液晶高分子链的刚性棒向无序相转变,导致相邻碳纳米管受到应力而解捻,进而产生收缩驱动。在电热驱动训练过程中复合纤维中的CNT纤维骨架被加工成具有螺环张开且扭矩平衡的结构,纤维受热收缩会对CNT纤维骨架压缩进而储存了弹性势能。断电后弹性势能的释放使得复合纤维恢复到原来大螺距、扭矩平衡的结构。这说明本工作中报道的仿生肌肉纤维的回复不需要外力辅助。因此该仿生肌肉纤维实现了有效循环做功。复合仿生肌肉纤维的驱动量高达56.9%,最大做功能力为2.11 J/g,与文献中报道的LCE纤维驱动器相比,该纤维做功能力处于最大值。在自恢复模式下,纤维循环32,000圈后驱动性能依然保持良好,具有优异的循环稳定性。(图3)
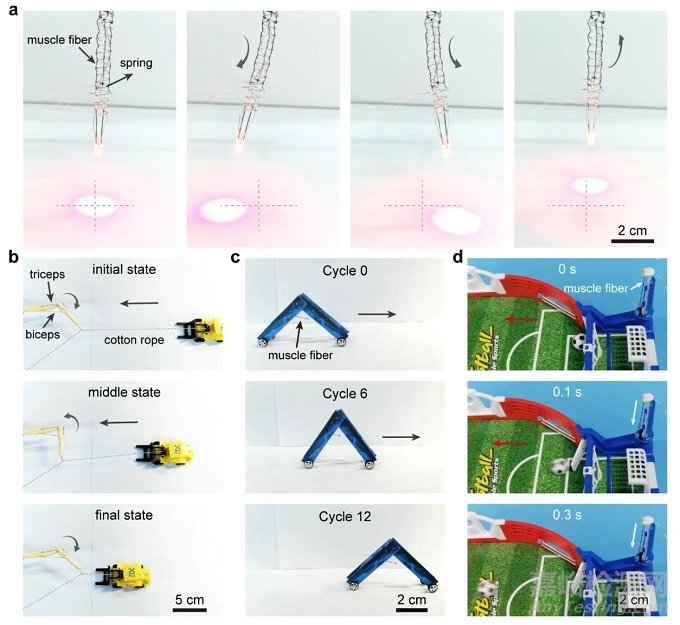
图4. LCE/CNT螺旋纤维的应用演示
基于LCE/CNT螺旋纤维优异的驱动性能及自恢复特性。研究团队将这种高性能的仿生肌肉纤维作为驱动单元与机械结构结合起来,演示了其在类内窥镜上的作用,可以实现内窥镜镜头的三向弯曲。进一步将纤维集束与仿生手臂结合,模仿人的手臂实现了拉车的动作。此外,基于纤维的快速响应特性,利用其瞬间的爆发力,纤维在机械爬虫及踢足球场景下都具有一定的应用潜力。(图4)
相关工作以Pretension-Free and Self-Recoverable Coiled Artificial Muscle Fibers with Powerful Cyclic Work Capability为题发表在ACS Nano上。论文第一作者为中科院苏州纳米所硕士生崔波,通讯作者为邸江涛研究员和李清文研究员。该工作得到了国家重点研发计划和国家自然科学基金等项目的支持。
论文链接:https://doi.org/10.1021/acsnano.3c03942