通过外部驱动源对动脉中的微或纳米机器人进行靶向导航的技术可用于诊断、靶向治疗和干预,在提高药物传递的选择性方面提供巨大前景,特别是在肿瘤学中,但目前的磁场力很难在人体内有足够的力量来维持以实现这种操作。因此,加拿大蒙特利尔大学Ning Li、Gilles Soulez和加拿大麦吉尔大学Sylvain Martel、上海大学张泉提出了一种算法来预测血管内微型机器人导航过程中患者的最佳重力位置。利用临床磁共振成像(MRI)中的磁场梯度进行磁共振导航,并与该算法相结合,提高磁性微型机器人(MMRs)的靶向效率。使用专用的微粒注射器、高精度MRI兼容的球囊充气系统和临床MRI,MMRs成功地通过活猪的肝动脉进入目标肝叶。微型机器人在右肝叶的分布比例从47.7增加到86.4%,在左肝叶的分布比例从52.2增加到84.1%。在通过多个血管分叉后,导航组到达4个不同靶向肝叶的MMRs数量比对照组增加1.7-2.6倍。对19例肝细胞癌(HCC)患者进行模拟表明,所提出的技术可以满足HCC患者肝栓塞的需要。本研究提出的技术为基于驱动器的微型机器人导航提供了可选择的方向。
相关研究成果以“Human-scale navigation of magnetic microrobots in hepatic arteries”为题于近日发表在《Science Robotics》上。
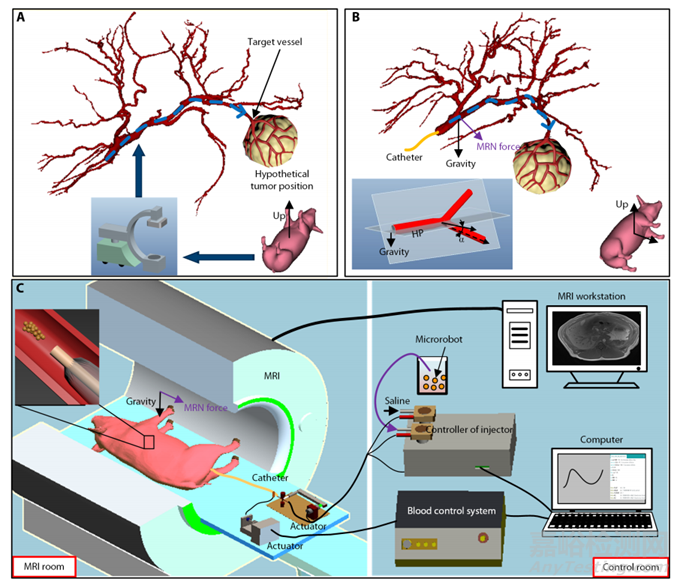
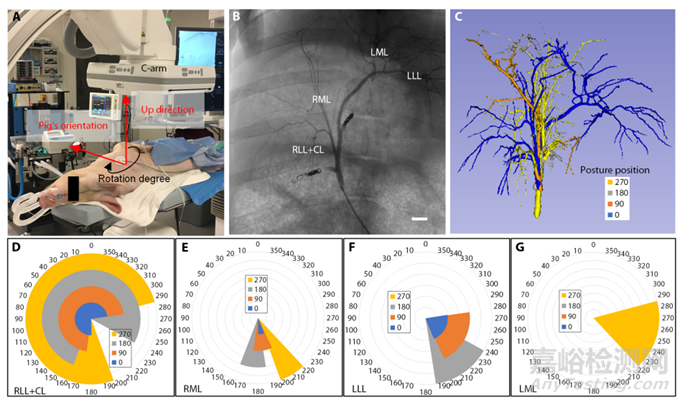
图1 微型机器人在体内的导航示意图
利用锥形光束计算机断层扫描(CBCT)和三维(3D)数字减影血管造影术(DSA)分割对比度图像,可以得到肝血管树的远端分支。在仰卧位(0°)、右侧外侧(90°)、俯卧位(180°)和左侧外侧位(270°)(图1a,仰卧位)获取容积图像。然后检查身体旋转角度的范围,特别是通路有利于重力向目标肝叶(右外侧+尾状叶(RLL + CL),右内侧叶(RML),左内侧叶(LML),或左外侧叶(LLL)),同时确保α保持小于0(图1B)。球囊腔连接到高精度MR兼容膨胀装置,将磁共振导航(MRN)的流速从40降低到8 cm/s(图1C)。
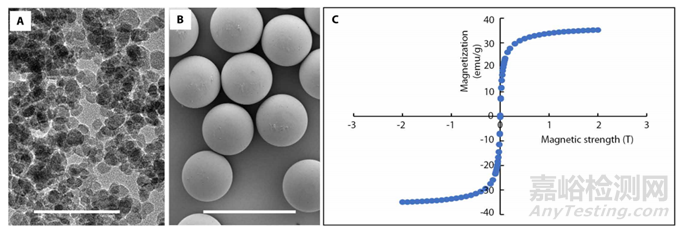
图2 实验中使用的磁性微型机器人
MMRs的制备主要有两个步骤:制备超顺磁性纳米颗粒(图2A),并将其封装到PLGA材料中(图2B)。MMRs在0T时没有迟滞,说明是真正的超顺磁性,在2T时磁化饱和值为36 emu/g(EV9,微感)(图2C)。
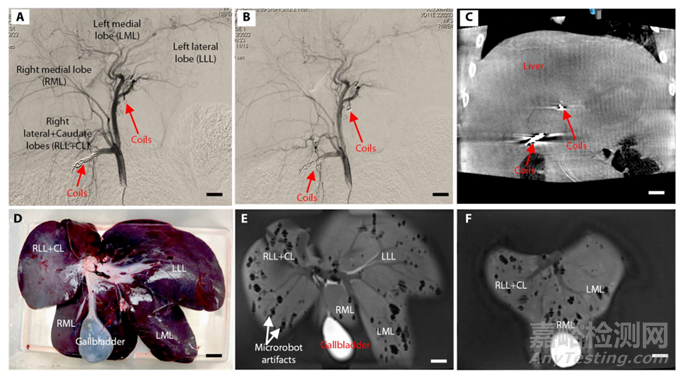
图3 无磁场血管造影室注射后MMR的肝脏分布
将2000根MMRs通过4-French导管直接释放到猪的固有肝动脉中,然后采集肝脏,用T1-VIBE图像进行成像。如图3所示,这些颗粒大部分均匀分布在四个肝叶中(RLL + CL、RML、LML和LLL)。这些颗粒主要集中在肝脏的外周区域,提示它们栓塞了小动脉。
图4 针对不同肝叶获得最佳旋转角度的工作流程
本研究开发了一个算法和一个流程图来确定患者的最佳位置。图4给出了计算结果,显示基于不同血管树(图4A、C)针对8号猪的不同肝叶获得的最佳身体旋转角度的范围(图4D-G)。对于导航组中的其他7头猪,血管分割和最佳旋转角度与图4B、D-G的结果相似。
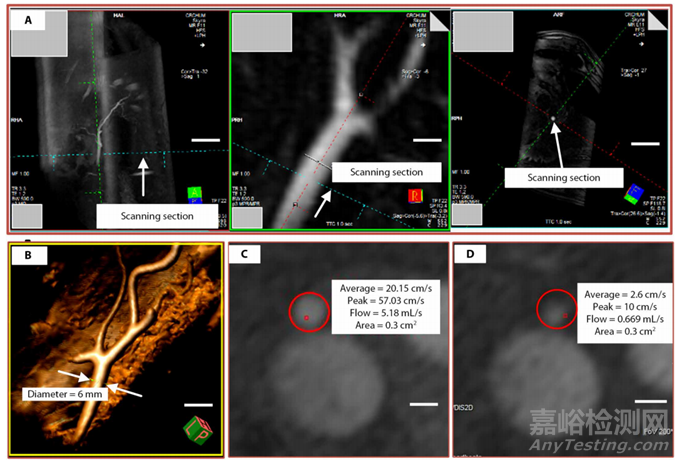
图5 控制和测量血流的程序
高流速会降低MRN的效率,因为在较短时间内,微弱的磁转向力没有足够的时间向目标叶瓣偏转。另一方面,低流量会导致微型机器人由于重力和摩擦而粘附在血管底部。肝主动脉的血流速率应在0.5~1.0 ml/s之间,以优化MRN。图5说明了测量血流速率的程序。从肝固有动脉横切面的影像相位对比图像中测量血流率,气球充气后控制流量为0.7 ± 0.3 ml/s。
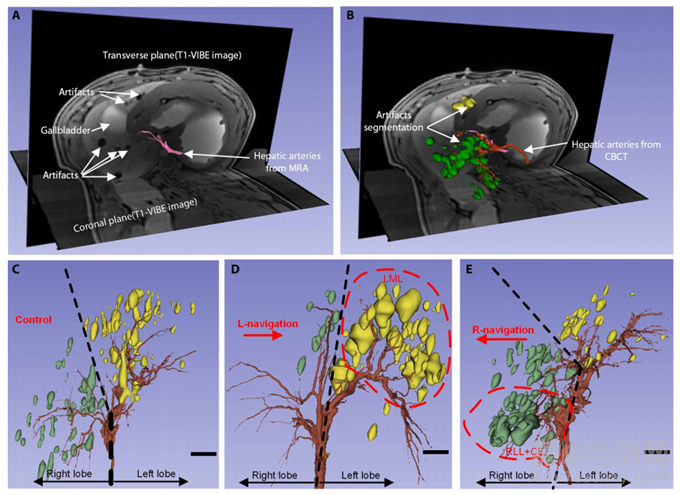
图6 猪体内微型机器人诱导的伪影定量和3D定位
MMR注射完成后,将猪从MRI视野中移出30秒,然后移回。在T1-VIBE图像上验证了伪影的位置(图6A)。为了更好地识别这些伪影分布,使用3D-Slicer对用CBCT图像分割出3D肝血管树在分割后的MRA图像上进行严格的影像融合(图6B)。这样就可以根据伪影的体积及其与肝动脉和四个肝叶的相对空间关系分析颗粒的分布(图6C-E)。
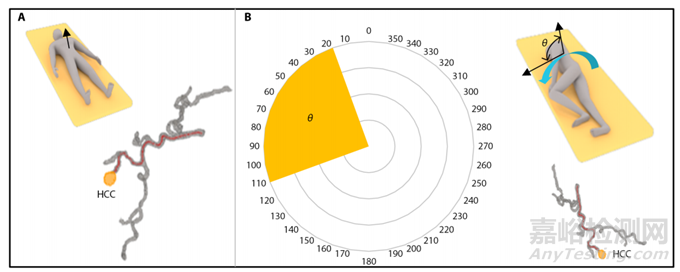
图7 利用该算法模拟人体肝脏解剖图谱中的MRN
无论肝脏分型如何,HCC结节的位置都主要发生在内侧叶。从这个图谱中,根据本研究提出的算法,确定了可以跨越到达肿瘤的分叉总数的数量。图7显示图谱中的HCC患者示例。如果患者右侧(光学患者体位在22°-110°之间),可以跨越朝向目标分支的前三个分支。无论患者的位置如何,都不能到达最后一个分叉(第四个)。
综上,本文提出了一种算法来确定患者的最佳位置,将有利于重力朝向目标血管分支;也就是说重力不会对导航产生负面影响,而是作为一种额外的导航力,使导航更容易。在12头猪身上进行一项可行性研究,表明当与重力结合时,MMRs的MRN是可能的,证明了在临床MRI中导航MMR靶向特定肝叶的可行性。因此,该技术可以提高基于外部驱动器的各种目标导航技术的效率,包括但不限于磁性导航。
文章来源:https://www.science.org/doi/10.1126/scirobotics.adh8702