您当前的位置:检测资讯 > 法规标准
嘉峪检测网 2025-07-24 10:04
1、手术机器人的发展进程
1.1起源与发展
1985年,世界上首次机器人手术成功实施是机器人技术在医疗领域应用的里程碑。当时,美国洛杉矶的医师成功完成了首例机器人辅助下脑部活检手术,使用的并非专业手术机器人,而是工业机器人Puma560。此后,手术机器人的研发与应用经历了三十余年的发展历程。在此期间,众多研发企业推出了手术机器人,包括AESOP、ZEUS等,其中,美国直觉外科公司所开发的达芬奇手术机器人系统,凭借其精巧的设计、清晰的视野和便捷的操作等优势脱颖而出,成为目前临床应用最广泛的手术机器人系统,并持续更新换代以满足不断变化的医疗需求[1-2]。
腔镜手术机器人在外科领域广泛应用,在我国,其辅助开展泌尿外科手术数量最多,在胸外科手术的应用也较常见,如食管癌、肺癌、纵隔肿瘤的手术。手术机器人操作精度高,灵活性好,且基本不受术者生理因素如劳累、情绪改变等影响,在一定程度上提升了术者的手术能力,降低了手术难度,减少了患者创伤。目前,已有多款国产多孔腔镜手术机器人获得了NMPA批准并上市,例如思哲睿智能医疗的康多®、山东威高手术机器人有限公司的妙手S、微创医疗机器人集团的图迈®和深圳市精锋医疗科技股份有限公司的MP1000机器人等。其中,威高妙手S机器人是国内首个采用主从控制进行腹腔手术的设备,突破了丝传动轻量化结构设计及解耦技术,增强了医生操作的灵活性;此外,折展式远端定心器械操作臂的设计,使其具有小型轻量化的优点。康多®机器人SR1000由苏州康多机器人有限公司研发,进入我国创新医疗器械绿色通道审查,是首个在泌尿外科领域进入该通道审查的腔镜手术机器人,并于2022年6月在泌尿外科领域获得第三类医疗器械注册证。2023年8月22日,全新升级版精锋多孔腔镜机器人二代机型系列凭借荧光显影、多模态画中画、双控制台等多项创新功能获NMPA批准,正式上市。北京术锐股份有限公司研发的腹腔内窥镜单孔手术系统(SR-ENS-600)于2023年6月取得NMPA批准上市,是国内单孔腔镜领域首款获批上市的手术机器人。瑞龙诺赋自主研发了模块化、灵巧型腹腔镜手术机器人“海山一”,其采用国内首创的模块化设计,可兼容医院内现有的腹腔镜设备,占地面积小、使用灵活,成本控制更加出色。总体来看,我国腔镜手术机器人的研发在国际上起步较晚,目前市场上与达芬奇手术机器人系统类似的产品占据多数,尚缺乏显著的原创技术特色。然而,在关键技术及核心部件的深入研究中,我国已累积了较为丰富的成果,展现出了坚实的技术实力。未来,我国必然会涌现出更多、更好的民族企业和产品,腔镜手术机器人领域也有望实现更为深入、卓越的发展[3-6]。
1.2 手术机器人的应用现状
21世纪,AI技术进入飞速发展的黄金时期,AI与机器人技术结合,为医疗领域带来了更高效、准确和安全的解决方案,有望提高诊疗效果,降低医疗成本,促进医疗资源均衡配置,推动医学领域的深层次变革[7-8]。在医学影像分析识别、疾病术前诊断以及药物开发等领域,AI技术的应用展现出显著的效果。具体而言,通过深度学习算法,AI能够自动分析并识别医学影像,并借助机器学习算法对海量病例信息进行分析,形成对各类病灶的精准影像学鉴别和诊断[9],从而指导术前诊断,规划更优的诊疗方案,为新病例的诊疗制定更加科学合理的计划[10-11]。此外,AI利用大数据分析和计算模拟可预测有效的药物靶点和药物结构,在药物开发过程中缩短了新药研发周期,促进相关药物快速上市[12]。在外科机器人手术领域,AI技术为主刀医生提供了术中实时影像支持,帮助医师准确识别病灶和解剖结构,并通过传感器模拟力反馈,为提升手术效果和安全性提供了有力保障[13]。
随着AI、物联网等技术的迅速发展与普及,将进一步提高手术机器人的智能化程度。目前手术机器人的智能水平通常分为6个等级[14]:0级机器人无智能;1级智能机器人可执行简单的辅助动作;2级智能机器人可自动完成医生指定的某些任务;3级智能机器人可自动完成手术中的某些步骤;4级智能机器人具备与一般外科医生相当的自动化水平;5级智能机器人无需人工干预便可完全自动地进行手术。然而,目前大部分腔镜手术机器人还只是延伸医生的手、眼功能,智能化等级较低,局限在0级或1级,缺乏在动态手术环境中智能识别和跟踪解剖目标的能力,缺乏可执行复杂手术任务的智能算法。在手术机器人技术的未来演进中,智能化是关键的发展方向之一。随着人工智能技术的不断进步,预计新型手术机器人将经历智能化的改造与升级,以实现对特定疾病与手术方式的智能识别与学习。这一变革将允许机器人在一定程度上替代医生的部分工作,实现自主手术操作的部分功能。此外,借助机器学习技术和大数据模拟算法,机器人将进一步提升手术操作的高效性、一致性和安全性,从而更有效地协助外科医生,为患者带来 福祉[15]。
随着技术的不断进步和应用领域的扩大,人工智能手术机器人将继续在医疗领域发挥重要作用,通过医工信、产学研合作开发,未来必然能够为更多的患者带来更好的治疗效果。
2、各专科手术机器人的进展
2.1 骨科手术机器人
骨科手术机器人术中可辅助定位骨折部位,帮助医生评估骨科创伤的严重程度,使得手术更精确,术中创伤更少。目前脊柱外科、创伤骨科和关节外科等将骨科手术机器人应用于手术治疗。国产较为先进的天玑®骨科手术机器人,其操作简便,用于脊柱全节段、骨盆骨折手术及四肢骨折手术[16-18],可辅助医生安全地将螺钉置入椎弓根,完成错位骨折端复位或内固定术及关节置换手术等,目前,其辅助完成的手术量居国内前列。骨科手术机器人提高了医师的诊治能力,但仍存在有效性不足、技术手段单一、智能化水平低、临床适应证窄等问题,需要继续优化及发展。
2.2 神经外科手术机器人
神经外科手术机器人内置系统可以根据患者影像资料,辅以重建和融合技术,规划选择出最佳手术路径[19],在颅内肿瘤切除、脑深部电刺激和颅内病理活检等颅内手术中有重要价值[20]。国产神经外科手术机器人Remebot(北京柏惠维康科技股份有限公司)[21]可以自动融合CT、MR、PET-CT等多种影像,自动划分皮肤、骨骼、脑组织及血管并进行三维成像和叠加,规划出安全的手术路径;全自动化大臂展机械臂搭载多种手术器械,可覆盖全脑并满足各种体位及手术路径需求;光学跟踪定位仪可以实时跟踪术中操作部位,应对各种手术突发情况。李啸林等学者在国产手术机器人辅助下开展高血压性脑出血患者颅内血肿穿刺引流术[22] 和神经内镜下切除颅内动脉瘤手术[23],手术治疗效果均较好,也较少有严重并发症出现。
2.3 心血管内/外科手术机器人
手术机器人技术提高了心血管介入治疗的精确性,降低了操作难度,其根据导管的导向能力分为被动导管机器人系统和主动导管机器人系统。当前血管介入手术中使用的多为被动导管机器人系统,其不具备导向能力,通过医生手动控制导丝运动,临床主要用于处理一些复杂及特殊的血管病变。主动导管机器人系统较为复杂,其头部中空可输送液体并有附加自由度[24-25],可结合图像导航技术,使自动血管介入手术成为可能,但其管径相对较大,角度活动范围有限是主动导管机器人系统设计需要解决的问题。因此,微型化、自动化、操作简洁化是未来血管介入机器人辅助导管技术的主要发展趋势。另外,导管需要有更好的生物兼容性和通用性[26],使其能用于各种类型的心血管介入治疗;若术中能将可视化和导航技术相结合,则可使得操作更安全、有效、简便。目前国内较为先进的一款心血管介入治疗机器人其精度误差比头发丝直径还小[27]。
2.4 胸外科手术机器人
2.4.1 经皮穿刺手术机器人 微创穿刺手术是诊断和治疗肿瘤的重要手段,但如何提高穿刺精度及缩短手术时间等问题,随着医学机器人技术的发展或许可以得到解决。马良等人[27]研发了一款全自动穿刺机器人,采用双臂式设计,实现了CT图像引导下的自动定位及自动化穿刺进针,其穿刺精度及自动化程度较高,但缺乏力反馈。田佩龙等人[28]研究出一种穿刺机器人力反馈系统,通过模拟肝穿刺试验和脑穿刺试验,验证了系统具有较高的控制精度及有效的力反馈。为了提高微创穿刺手术机器人智能化的水平,李华煜等人[29]分析了医疗机器人、机器人路径规划、数字孪生技术的发展现状后,提出了一种基于虚拟力场的机器人路径规划算法,并在数字孪生实验平台上完成了机器人模拟穿刺实验。结果表明,数字孪生系统可以有效地指导机器人完成穿刺操作,证明手术机器人智能穿刺具备可行性。
2.4.2 支气管镜手术机器人 手术机器人的支气管镜系统能到达更远、更细的气道内,可用于导航、定位、活检及介入治疗,是帮助诊断肺部病变的一种新技术。2022年3月30日,四川大学华西医院李为民教授、刘丹教授带领团队成功完成了全国首例国产机 器人辅助经支气管镜肺结节活检术[30]。郭超等人[31]通过Meta分析得出,机器人支气管镜(MonarchTM和IonTM系统)在肺结节诊断方面安全、有效,应用前景广阔。经支气管镜活检术较经皮穿刺术具有创伤小、恢复快的优点,但此类手术缺乏自动化。占雄等人[32]研发了新型支气管镜手术机器人系统进行可视化活检,其融合了电磁导航和柔性内窥镜技术,能完成术前肺支气管模型重建、术中手术路径自动规划及实时导航,提高了内窥镜导管控制精度及手术效率,减轻术者手术操作负担。然而,目前经支气管肺活检的诊断率(约70%)仍低于经皮肺穿刺活检的诊断率(约90%),相信随着机器人技术的发展,此类问题也将得到解决。
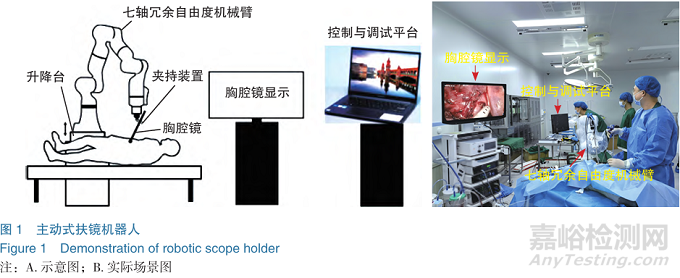
2.4.3 主动式扶镜机器人 2022年,本团队联合某世界500强企业、浙江大学机器人研发团队以及本土医疗企业,成功开发了胸腔镜蛇形扶持器,并研究在此基础上进行智能升级,使其能够自动扶持胸腔镜,根据主刀医生意图进行调节,追踪胸腔镜视野中的某个器械自动移动,以解决主刀医生与助手医生配合度差的问题,实现手术去助手化,节省医疗人力资源,并缓解助手疲劳。该项目已成功申报浙江省“尖兵”、“领雁”研发攻关计划并获批,项目开展两年多来,在多方共同努力下,目前已形成样机,经开展初步动物实验,结果显示该自动式扶镜机器人夹持胸腔镜稳定(如图1),能够追踪超声刀、电钩、吸引器等器械移动,但移动速度、识别灵敏度等仍有待提升。项目组将结合前期研发经验及测试数据,进一步改造升级该扶镜机器人,以期能够更好地适应胸腔镜手术实际场景,并最终落地形成产品,造福广大患者。
3、国产手术机器人的应用进展
目前国产手术机器人根据应用领域主要分为骨科手术机器人、神经外科手术机器人、腔镜手术机器人、血管介入治疗机器人、支气管镜手术机器人及其他手术机器人,但目前都还不能自主完成手术,需要由医生操纵机器人完成[32]。未来手术机器人的发展趋势如下。
3.1 远程同步化
在5G技术加持下,目前我国已完成多例人体超远程机器人手术。随着我国通信技术的进一步发展,未来手术机器人将结合互联网技术、人工智能辅助技术及虚拟现实技术,实现医生同步精准地完成远程手术。
3.2 智能化
手术机器人的发展趋势之一是可融合人工智能辅助诊断并制定个体化手术方案。手术机器人的智能化将会使人机交互系统个性化,其能快速有效地理解和执行医生的指令,具有动力反馈,能自主规划路径,提高手术安全性,进行术后智能评估等。
3.3 普及化
“十四五”期间进一步制定了机器人产业发展规划,在利好政策加持下,应用市场会持续扩大,这将促使我国自主研发手术机器人技术快速发展,技术程度逐渐提升。随着国产手术机器人技术更新迭代,成本逐渐降低,以及未来的医疗智能化建设所需,手术机器人将从一、二线城市逐步拓展到三、四线城市[33-34]。
4、胸外科人工智能手术机器人的可能架构
4.1 系统组成
胸外科一站式专科机器人的全面构建是多项尖端技术深度融合与创新的成果,旨在打造围术期专科专病的全方位管理体系[35]。该系统贯穿术前精准诊断、术中精细操作、术后加速康复的全过程,集成了术前规划、自动追踪、精确切除、细胞学评估及增强现实辅助等多个功能模块[36],实现了胸外科治疗的智能化、高效化与个性化。这些模块可根据实际情况和需要,灵活选择并综合应用,以实现因事制宜、因地制宜的个性化医疗服务。
以肺楔形切除术为例,在术前准备阶段,术前规划模块发挥着核心作用,可精确识别肺结节的位置,并据此精细规划手术路径。相较于传统的CT二维成像技术,三维重建技术能够提供更全面、更详细的三维空间信息,包括结节的形态、支气管的走向、血管的分布等,为外科医生提供了丰富的解剖学数据,有助于医生制定出更加精确、更加个性化的手术方案。目前,张树亮等人[37]将三维影像技术和达芬奇机器人结合用于精准肺段切除术。同时,应用人工智能的学习算法,术前规划模块能够自动分析患者的三维影像数据,预测最佳的手术路径,实现手术指征的标准化,并在患者个体差异的基础上实现手术路径的精准化定制。术中,精准切除模块能够对实际情况进行实时、细致的分析,自动且准确地判断最佳的切除范围,以确保手术的安全切缘。同时,它还能根据具体情况智能选择最合适的缝合方式。而且,该模块还可以集成自动跟踪技术和荧光血管标记技术,以进一步提升手术的精准性和安全性。自动跟踪技术的应用,使得手术机器人能够实时追踪手术器械和组织的位置,确保切除的精确性,并有效避开重要血管和支气管。荧光血管标记技术的引入,为手术提供了更为直观的血管分布信息,通过注射荧光剂,手术团队可以清晰地观察到血管走向,从而在手术过程中更加精准地操作,避免误伤重要血管。陈冲等人[38]通过研究验证了荧光三维成像技术的可靠性。为了更精确地指导手术切除范围,细胞学评估模块中的快速现场细胞学评估技术被广泛应用于良恶性病变的初步鉴别。手术机器人手臂具有高度的灵活性和精度,能够在医生的远程操作下进行切割、缝合等手术操作,其手臂的末端装有微型手术器械,如切割闭合器、缝合针等,在人工智能的配合下可以完成传统手术中由医生手动完成的复杂操作,实现自动化切除与缝合。
4.2 手术机器人相关人工智能技术创新与突破
4.2.1 三维重建 使用断层成像的术前3D重建越来越多地应用于具有挑战性的手术病例,为手术计划的制定、实施以及患者术后的康复带来了革命性的变革。借助前沿的重建技术,医生能够细致入微地勾勒出复杂肿瘤的全貌及其内部结构,精确测量实性肿块的尺寸、定位其空间位置,并清晰展示其与毗邻组织的相互关系,从而为手术方案的制定提供高度精确且详尽的解剖学参考蓝图[39]。这一技术不仅可以帮助医生制定详细的手术计划,还能够在术前预测并规划专用的血管结扎方案,从而最大限度地优化组织保存,减少手术中的损伤。3D打印技术的引入极大地推动了胸外科手术向更加精准与微创的方向发展[40],医生可以制作出与患者实际情况高度一致的器官和组织模型,用于术前的模拟操作和训练。这不仅提高了手术的精度和安全性,还使得机器人微创手术得以广泛应用,进一步减少了患者的创伤和恢复时间。
4.2.2 虚拟现实技术 虚拟现实(Virtual Reality,VR)技术是一种先进的计算机技术,旨在创建并让用户身临其境地体验虚拟世界。该技术深度融合了计算机图形系统、多样化的现实模拟以及精密的控制接口设备,共同构建出一个高度互动的三维环境。用户能够在这个由计算机技术精心打造的空间中自由探索,享受前所未有的沉浸式体验。将VR技术与机器人手术结合,可以带来更为精准、高效和安全的手术体验[41]。首先,通过整合患者的CT、MRI等医学影像,该技术能够创造出高保真度的三维虚拟人体模型。医生利用此模型,在虚拟环境中进行手术预演,精确规划手术路径,包括血管结扎等细节操作,有效降低了手术过程的不确定性,提高了手术的安全性和成功率[42]。如近期王俊团队首次将Apple Vision Pro 应用于胸腔镜手术,术中将患者CT图像、三维重建肺部影像等数字内容融入真实世界,为医生提供了高清、无延迟的影像资料支持,帮助医生准确、有效地完成手术,或者将VR技术生成的虚拟影像转化为“全息影像图”,这些图像可以覆盖在患者真实的手术部位上,医生在手术过程中可以清晰地看到手术器械与患者体内组织的相对位置,确保手术的精确性。其次,VR技术可以为机器人手术系统提供实时导航功能,确保机械臂在手术过程中能够准确到达预定位置[43]。通过VR眼镜,医生可以直观地看到手术区域的三维视图,与机器人手术系统形成无缝对接。而且,VR技术可以模拟出多种感官体验,如力学反馈,光学反馈等,使医生在手术过程中能够感受到更多的信息。最后,利用VR技术构建的虚拟手术环境,医生可以在其中进行手术操作训练[44-45]。这种训练方式不仅安全、无风险,而且可以随时进行,记录医生在虚拟环境中的手术操作过程,并进行客观的分析和评估,有助于医生了解自己的操作水平,进一步提高手术质量。
4.2.3 术中实时病理 将术中实时病理与人工智能手术机器人相结合,可以进一步提高手术效率和诊断的准确性[46]。一是利用高新技术实现实时数据共享与交互。术中实时病理产生的数据,如组织切片图像、病理诊断结果等可以实时传输至人工智能手术机器人的控制系统,手术机器人可以根据病理数据调整手术策略,确保手术的精确性和安全性。二是可以实现自动化标本处理。利用机器人技术可以自动化完成术中实时病理的标本处理过程,如切片、染色等,这不仅可以减轻医务人员的工作负担,还可以提高标本处理的效率和准确性。三是人工智能化病理诊断[47-48]。结合AI技术,可以对术中实时病理的图像进行智能分析和诊断,AI算法可以快速识别病变组织的特征并给出准确的诊断结果,这将大大缩短病理诊断的时间,提高手术的效率和准确性。
4.2.4 病灶智能定位 随着计算机视觉与深度学习技术的飞跃,传统肺结节定位手段正迈向智能化新阶段,包括CT引导穿刺、支气管镜导航、近红外荧光、术中超声、肺流域分析及无创定位等方法,均有望迎来智能化升级[49]。其中,机器人辅助导航系统融合了医学影像、机器人操控与AI算法,实现了对肺结节的高效、精确定位。该系统首先利用CT等医疗设备捕获患者肺部的高清影像,随后通过图像优化技术如降噪、增强等,提升图像清晰度;借助特征提取算法精准捕捉结节的形态、尺寸、位置及纹理特征;采用先进的模式识别技术对这些特征进行智能分析,实现肺结节的自动化识别与定位。结合三维可视化工具,医生能够直观、精确地掌握肺结节的空间位置,深入剖析其与周边血管、支气管的复杂关系,预判手术中的解剖变异情况。这不仅帮助医生精准锁定肺结节所在的肺段或亚段[50],还促进了手术方案的个性化定制,确保在切除病灶的同时,最大限度地保留健康肺组织,推动了胸外科手术的精准化、微创化发展。
4.2.5 镜头自动跟踪技术 在胸腔镜手术中,人工扶镜的重要性不言而喻。然而,由于扶镜手的技巧水平参差不齐,对手术细节的理解有限,加之长时间操作引发的手部疲劳和震颤,以及胸腔内解剖位置的复杂性等因素,常常会出现底座不稳、画面偏移、无法与主刀医生的手术节奏保持同步等问题。
这些问题不仅限制了术野的清晰度,还可能对手术医生操作的精确性、手术的流畅性以及整体质量产生负面影响,严重时甚至可能增加术中组织损伤的风险。为了克服这些问题,机器人技术的引入为腔镜手术中的扶镜工作提供了一种创新的解决方案[51]。机器人具备高精度定位、快速响应以及运动平稳性强的显著优势,并且不受情绪波动和疲劳等人为因素的干扰。当前,基于腔镜图像的主动式引导正成为扶镜机器人的主流交互模式,其核心在于手术器械的视觉追踪[52]。通过这一技术,机器人能够实时跟踪手术器械的位置和动作,为主刀医生提供更为精准和稳定的视觉支持,从而提升手术效率和安全性。
4.3 面临的挑战与应对策略
手术机器人实现自动化切除病灶,除了面临技术挑战,伦理和法规问题也是其重要挑战之一。随着手术机器人越来越普及,如何确保患者的隐私和权益成为亟待解决的问题。此外,手术机器人的使用也需要遵循严格的伦理和法规标准,以确保医疗安全和患者的福祉。经济社会方面的挑战和影响需引起高度重视。手术机器人的研发和生产成本较高,需通过合理的资金投入和政策支持,推动手术机器人的普及与推广,提高医疗资源的利用效率和服务水平。同时,需要对医疗人员进行培训和技能提升,只有不断提升医疗人员的专业素养和技能水平,才能更好地适应手术机器人的发展和应用。这对医疗资源的分配和医疗体系的改革都提出了新的要求。
针对当前的挑战与问题,我们需采取积极主动的应对策略。首要任务是强化技术研发与创新能力,力求在技术层面取得新突破,以提升手术机器人的效能与智能化水平,从而更有效地满足医疗需求,保障手术质量。同时,建立健全伦理与法规框架,确保技术创新与社会价值和谐共生。制定严格的规范和标准,确保手术机器人的使用符合伦理和法律要求,保障患者的权益和安全。
总之,人工智能手术机器人在医疗领域的应用面临着多方面的挑战与问题。我们需要从多个角度出发,采取综合措施加以应对和解决。只有这样,才能更好地发挥手术机器人的优势和作用,为医疗事业的发展和人类健康水平的提高做出更大的贡献。
5、胸外科手术机器人的发展
5.1 应用前景
随着科技的飞速发展,人工智能手术机器人正逐渐从专业领域走向大众视野,其普及与推广已成为医疗领域的重要议题。据统计,截至2023年,全球已有超过500家医院引入了手术机器人,其中不乏知名医疗机构,如约翰·霍普金斯医院和哈佛医学院附属麻省总医院。这些手术机器人不仅在心血管、神经外科等领域发挥着重要作用,而且逐渐拓展至胸外科等其他手术领域。以达芬奇手术机器人为例[53],其精准度高达毫米级,远超传统手术。此外,机器人手术还能减少手术过程中的抖动,降低手术风险。目前,达芬奇手术机器人已应用于纵隔肿瘤、肺部肿瘤及食管肿瘤切除等胸外科手术中。据研究,使用达芬奇手术机器人进行非小细胞肺癌根治术可以清扫更多的淋巴结,并在肺亚段切除术上存在一定的技术优势[54]。然而,人工智能手术机器人在广泛应用过程中仍面临多重挑战。首要挑战在于其高昂的成本,如达芬奇手术机器人,其高昂的购置费用及后续维护成本对多数医疗机构构成了经济负担。在现有达芬奇手术机器人基础上进行智能升级,需投入更多的研发、转化费用,可能造成更高的购置和维护费用。此外,手术机器人的操作要求医生经历长时间的学习与训练,方能熟练掌握其操作技巧,这亦是一个不容忽视的挑战。
为了推动人工智能手术机器人的普及与推广,政府、医疗机构和企业需要共同努力。政府可以出台相关政策,提供资金支持,降低手术机器人的购置成本。医疗机构应积极强化医生培训,以提升医生对手术机器人的操控能力,确保技术应用的精准与高效。同时,企业应持续加大研发投入,致力于开发拥有智能导航、智能解剖结构识别、智能出血及碰撞预警、智能力反馈、智能切除范围规划、智能视野跟踪等一种或多种功能的手术机器人产品,以满足不同医疗机构的需求,推动手术机器人技术的普及与应用。正如著名医学家威廉·奥斯勒所言:“医学是一门不断进步的科学”。人工智能手术机器人的普及与推广将为医疗行业带来革命性的变革,让手术更加精准、安全、高效。随着技术的不断进步和成本的降低,相信未来会有更多的医疗机构和患者受益于这一先进的医疗技术。
5.2 伦理与法规的完善
随着人工智能手术机器人的快速发展,伦理与法规的完善成为一个不可忽视的问题。为了确保人工智能手术机器人的安全和有效性,必须建立严格的伦理和法规框架来指导其研发、应用和管理。这一框架不仅涉及技术层面,还涵盖了伦理、法律和社会等多个方面。
在伦理层面,人工智能手术机器人的应用必须遵循医学伦理原则,尊重患者的自主权和隐私权。例如,在手术前,机器人系统应充分告知患者手术的风险、预期效果和替代方案;此外,机器人系统还应保护患者的隐私,确保手术过程中的个人信息不被泄露。在法规层面,各国政府应制定相应的法律法规来规范人工智能手术机器人的研发和应用,应明确手术机器人的准入标准、监管机制、责任归属等问题。例如,设立专门的监管机构来负责审批和监督机器人手术系统的安全性和有效性,确保其在符合标准的前提下方可上市应用。此外,为了应对可能出现的伦理和法规挑战,人工智能手术机器人的研发者和应用者还应建立相应的伦理审查机制和法律风险防范体系,确保机器人在研发和应用过程中始终遵循伦理和法规要求,减少潜在的风险和纠纷。
总之,伦理与法规的完善是人工智能手术机器人发展的重要保障。只有建立了严格的伦理和法规框架,才能确保手术机器人在医疗领域的安全、有效应用,为人类的健康福祉做出更大的贡献。
6、总结与展望
专科手术机器人是未来手术机器人发展的主流。在胸外科领域,人工智能通过深度模拟人类思维的方式,更好地“替代”胸外科医师执行结节术前诊断、定位、切除范围规划等任务,这种变革使得许多过去看似不可能的事情现在成为可能。展望未来,医疗人工智能有望改变从胸外科疾病诊断、治疗到预后等全部医疗流程,与手术机器人技术结合后,将更大程度地发挥机器人在精准性、诊疗决策辅助等方面的优势,更好地造福胸外科患者。随着人工智能技术的日益精进,我们是否能够期待机器人全面取代人类在手术台上的角色?同时,随着这些智能系统的“进化”,我们又是否能够确保拥有足够的技术储备来应对可能出现的各种突发状况?此外,未来医疗人工智能可能获取患者全部的病历、检查和影像等资料,有望提供快速且准确的诊断,并根据患者病情提供最优的治疗方案,在带来获益的同时,也可能引发医疗事故、隐私泄露等法律问题。例如,手术机器人若在辅助或替代医务工作者进行诊断、治疗和预后评估过程中出现错误,那么医务工作者、医疗机构以及机器人制造商可能均涉及法律责任,在现有法律侵权责任体系下,患者权益能否得到充分保护,仍值得探讨。如上文所述,手术机器人现在处于弱人工智能或无人工智能阶段,在适用产品责任与医疗损害责任规制时仍遇到了一些难题。在评估责任适用性时,法律学者建议应基于损害产生的不同原因分别采用医疗产品责任或医疗技术损害责任进行判定。对于医疗产品责任,可探索优化各类缺陷认定的标准体系,并构建手术机器人专家认证机制,以消除缺陷认定的障碍。同时,通过技术创新和政策扶持等手段,实现“算法黑箱”的透明化,从而简化因果关系的认定流程。至于医疗技术损害责任,应遵循过错责任原则直接将责任归于医疗机构。在具体判定方法上,可依据理性医师标准或合理医师标准,区分由自主手术机器人或医师自身造成的医疗过失,以确保医疗过错的准确界定。此外,应高度重视专家证人的专业意见,确保因果关系的科学认定[15,55-57]。
总之,医生应当保持与医疗AI研发企业及团队、法律体系之间的互动,共同寻找法律体系、医疗机构与科技发展之间的平衡点,胸外科专科手术机器人的研发应结合人工智能技术,辅助病灶定位、诊断、术中导航、解剖结构识别及预警、切除范围规划、甚至自动化切除等方面,更好地造福广大胸外科患者。
参考文献:
[1] 王述民. 机器人手术十年体会[J]. 中华胸部外科电子杂志, 2021, 8(1): 1-5.
[2] 马洪海, 胡坚. 发展前进中的胸外科手术机器人[J]. 机器人外科学杂志(中英文), 2022, 3(1): 1-3.
[3] 张旭, 范阳. 机器人手术在泌尿外科的应用现状与未来发展[J]. 加速康复外科杂志, 2021, 4(2): 49-54.
[4] 段小燕, 巫慧, 黄婷, 等. 机器人技术治疗妇科疾病的现状及前景[J]. 赣南医学院学报, 2021, 41(12): 1272-1276.
[5] 贾昱欣, 张亚杰, 李鹤成. 机器人手术在胸外科的应用现状与进展[J]. 机器人外科学杂志(中英文), 2022, 3(5): 367-375.
[6] 连国栋, 李乐平, 靖昌庆. 机器人结直肠手术的局限与前景[J]. 机器人外科学杂志(中英文), 2020, 1(4): 286-293.
[7] 谢友涵.人工智能的发展与影响[J].消费导刊, 2017. DOI: 10.3969/ j.issn.1672-5719.2017.34.224.
[8] 苏楠. 人工智能的发展现状与未来展望[J]. 中小企业管理与科技, 2017. DOI: 10.3969/j.issn.1673-1069.2017.10.052.
[9] Panayides A S, Amini A, Filipovic N D, et al. AI in medical imaging informatics: current challenges and future directions[J].IEEE Journal of Biomedical and Health Informatics, 2020, 24(7): 1837-1857.
[10] SHI F, WANG J, SHI J, et al. Review of artificial intelligence techniques in imaging data acquisition, segmentation, and diagnosis for COVID19[J]. IEEE Reviews in Biomedical Engineering, 2021. DOI: 10.1109/ RBME.2020.2987975.
[11] Mak K K, Pichika M R. Artificial intelligence in drug development: Present status and future prospects[J]. Drug Discovery Today, 2019, 24(3): 773-780.
[12] 陈妍, 吴秋蓬, 曾德威, 等. 机器人流程自动化在医疗领域面临的机遇与挑战[J]. 医学信息学杂志, 2023, 44(3): 69-73.
[13] CHEN Y, WU Q P, ZENG D W, et al. Opportunities and challenges of robotic process automation in healthcare[J]. Journal of Medical Informatics, 2023, 44(3): 69-73.
[14] YANG G Z, Cambias J, Cleary K, et al. Medical robotics-regulatory, ethical, and legal considerations for increasing levels of autonomy[J]. Science Robotics, 2017, 2(4): eaam8638.
[15] 韩晓光, 朱小龙, 姜宇桢, 等. 人工智能与机器人辅助医学发展研 究[J]. 中国工程科学, 2023, 25(5): 43-54.
[16] 聂德新, 孙文皋, 王小强, 等. 天玑机器人辅助下置钉与传统空心螺钉内固定股骨颈骨折疗效比较[J]. 中国骨伤, 2023, 36(3): 221-225.
[17] Choi M S, Yun S H, Lee S C, et al. Learning curve for single-port robotassisted colectomy[J]. Ann Coloproctol, 2024, 40(1): 44-51.
[18] Beaman C B, Kaneko N, Meyers P M, et al.A review of robotic interventional neuroradiology[J]. AJNR Am J Neuroradiol, 2021, 42(5): 808-814.
[19] Khanna O, Beasley R, Franco D, et al. The path to surgical robotics in neurosurgery[J]. Oper Neurosurg, 2021, 20(6): 514-520.
[20] WU S Q, WANG J W, GAO P, et al. A comparison of the efficacy, safety, and duration of frame-based and Remebot robot-assisted frameless stereotactic biopsy[J]. Br J Neurosurg, 2021, 35(3): 319-323.
[21] 李啸林, 胡火军, 汪雷, 等. 机器人辅助下HICH患者颅内血肿穿刺引流术[J]. 巴楚医学, 2024, 7(1): 28-30.
[22] 李啸林, 胡火军, 汪雷, 等. 机器人辅助神经内镜下颅内动脉瘤切除术[J]. 巴楚医学, 2024, 7(1): 24-27.
[23] Saliba W, Cummings J E, Oh S, et al. Novel robotic catheter remote control system: feasibility and safety of transseptal puncture and endocardial catheter navigation[J]. J Cardiovascular Electrophysiology, 2006, 17(10): 1102-1105.
[24] Faddis M N, Chen J, Osborn J, et al. Magnetic guidance system for cardiac electrophysiology: a prospective trial of safety and efficacy in humans[J]. J The American College of Cardiology, 2003, 42(11): 1952-1958.
[25] 吉程, 侯增广, 谢晓亮, 等. 心血管微创介入机器人导管控制技术综述[J]. 机器人技术与应用, 2011, 000(6): 25-33.
[26] 本刊讯. 心血管介入手术机器人研制成功[J]. 中国医疗器械杂志, 2014, 38(3): 195.
[27] 马良. 图像引导下的胸腹部穿刺手术机器人关键技术研究[D].天津: 天津大学, 2019.
[28] 田佩龙, 刘军强, 刘建华, 等. 一次性多用途力反馈穿刺手术机器人[J]. 机械设计, 2023, 40(6): 45-51.
[29] 李华煜. 基于数字孪生的微创穿刺手术机器人控制[D].北京: 北京交通大学, 2023.
[30] 任嘉霖, 刘凯. 四川大学华西医院: 完成全国首例国产机器人辅助经支气管镜肺结节活检术[J]. 中华医学信息导报,2022, 37(7): 7.
[31] 郭超, 张家齐, 李桢, 等. 机器人支气管镜在肺结节活检中有效性与安全性的系统评价与Meta分析[J]. 中国胸心血管外科临床杂志, 2023, 30(2): 226-232.
[32] 占雄, 张飘艺, 周刚, 等. 一种新型支气管镜手术机器人系统[J]. 中国医疗器械杂志, 2023, 47(1): 19-25.
[33] 国务院办公厅. 国务院办公厅关于印发“十四五”国民健康规划的通知(国办发〔2022〕11号)[J]. 中华人民共和国国务院公报, 2022, (16): 17-31.
[34] 石晓飞. 国产机器人在医疗手术方面的发展与应用[J]. 智能制造, 2023, (5): 55-58.
[35] 黄旭华, 徐金明, 王新, 等. 智能化胸外科专科专病机器人的研发与前景[J]. 中国胸心血管外科临床杂志, 2022, 29(9): 1210-1216.
[36] 黄沙, 何哲浩, 王志田, 等. 人工智能时代机器人外科诊疗进展及展望[J]. 中国胸心血管外科临床杂志, 2019, 26(3): 197-202.
[37] 张树亮, 郑斌, 徐国兵, 等. 联合降维法在达芬奇机器人辅助精准肺段切除术中的应用[J]. 中华胸部外科电子杂志, 2019, 6(2):139-140.
[38] 陈冲. 斑马鱼血管系统的三维荧光成像技术研究[D].合肥:中国科学技术大学, 2023.
[39] Natale G, Leonardi B, Messina G, et al. Three-imensional lung reconstructions for the localization of lung nodules to be resected during surgery[J]. Thorac Cancer, 2023, 14(34): 3389-3396.
[40] WANG L, YAN X L, LI J, et al. Outcomes following the excision of sarcoma and chest wall reconstruction using 3D printed implant[J]. iScience, 2024, 27(2): 108757.
[41] Waisberg E, Ong J, Masalkhi M, et al. Apple Vision Pro and why extended reality will revolutionize the future of medicine[J]. Irish Journal of Medical Science, 2023. DOI: 10.1007/s11845-023-03437-z.
[42] Lopez P, Belgacem A, Sarnacki S, et al. Enhancing surgical planning for abdominal tumors in children through advanced 3D visualization techniques: a systematic review of future prospects[J]. Front Pediatr, 2024. DOI: 10.3389/fped.2024.1386280.
[43] Can Kolac U, Paksoy A, Akgün D. Three-dimensional planning, navigation, patient-specific instrumentation and mixed reality in shoulder arthroplasty: a digital orthopedic renaissance[J]. EFORT Open Rev, 2024, 9(6): 517-527.
[44] PENG M J, CHEN H Y, CHEN P, et al. Virtual reality-based surgical planning simulator for tumorous resection in FreeForm Modeling: an illustrative case of clinical teaching[J]. Quant Imaging Med Surg, 2024, 14(2): 2060-2068.
[45] Killeen B D, Zhang H, Wang L J, et al. Stand in surgeon’s shoes: virtualreality cross-training to enhance teamwork in surgery[J]. Int J Comput Assist Radiol Surg, 2024, 19(6): 1213-1222.
[46] Vaidya Y P, Shumway S J. Artificial intelligence: The future of cardiothoracic surgery[J]. J Thorac Cardiovasc Surg, 2024.DOI: 10.1016/ j.jtcvs.2024.04.027.
[47] Amparore D, De Cillis S, Alladio E, et al. Development of machine learning algorithm to predict the risk of incontinence after robot-assisted radical prostatectomy[J]. J Endourol, 2024, 38(8): 871-878.
[48] Kaneko M, Fukuda N, Nagano H, et al. Artificial intelligence trained with integration of multiparametric MR-US imaging data and fusion biopsy trajectory-proven pathology data for 3D prediction of prostate cancer: A proof-of-concept study[J]. Prostate, 2022, 82(7): 793-803.
[49] 马洪海, 王延烨, 何哲浩, 等. 肺结节同质化楔形切除智能机器人研发前景及模式探索[J]. 中国医学装备, 2023, 20(10): 1-6.
[50] Cannone G, Verzeletti V, Busetto A, et al. Three-imensional imaging guided lung anatomic segmentectomy: A single-center preliminary experiment[J].Medicina (Kaunas), 2023, 59(12): 2079.
[51] Reiter A, Allen P K, Zhao T. Appearance learning for 3D tracking of robotic surgical tools[J]. J International Journal of Robotics Research, 2014, 33(2): 342-356.
[52] Norouzi-Ghazbi S, Janabi-Sharifi F. A switching image-ased visual servoing method for cooperative continuum robots[J]. Journal of Intelligent & Robotic Systems, 2021, 103(3): 42.
[53] HUANG J, ZHU H D, LU P J, et al. Comparison of lobectomy performed through Toumai® surgical robot and da Vinci surgical robot in early-stage non-small cell lung cancer: a retrospective study of early perioperative results[J]. Transl Lung Cancer Res, 2023, 12(11): 2219-2228.
[54] Moran P S, O’Neill M, Teljeur C, et al. Robot-assisted radical prostatectomy compared with open and laparoscopic approaches: A systematic review and meta-analysis[J].International Journal of Urology, 2013.DOI: 10.1111/ iju.12070.
[55] 王超.医疗人工智能致人损害的赔偿责任探析[J].锦州医科大学学报(社会科学版), 2024, 22(3): 34-40, 47.
[56] 邓明玉. 手术机器人医疗损害责任研究[D]. 重庆: 西南政法大学, 2021.
[57] 丁璐.人工智能体医疗损害责任分析——以达芬奇手术机器人为例[J]. 北京化工大学学报(社会科学版), 2020.DOI: CNKI: SUN: BHGS.0.2020-01-011.
来源:林涛马洪海机器人外科学


