导 语
脑卒中后上肢功能障碍很常见,会导致进食、穿衣等日常活动困难。机器人辅助康复是一种很有前途的上肢干预方法,它允许脑卒中患者进行重复训练,从而最大限度改善上肢运动功能。高丽大学的研究团队联合国家康复中心对比分析了在阻力式(RET)与主动式(AAT)这两种不同模式的机器人辅助训练下脑卒中患者的康复效果差异。相关成果发表在了《Annals of Physical and Rehabilitation Medicine》上。
1、研究背景
机器人辅助康复,作为有效的上肢运动恢复干预方式,提供了可重复和可量化的高强度运动训练,以及以任务为导向的练习,来充分帮助脑卒中患者恢复运动机能。与和训练量匹配的非机器人干预康复相比,机器人康复可显著改善身体功能和力量。根据上肢功能状态选择合适的模式,可以使机器人康复效果最大化。各种模式,如主动、被动、主动辅助和阻力式方法已被用于机器人康复。在主动模式下,个体主动移动肢体。而在阻力模式(RET)下,机器人不顾个体的意图进行运动。在主动辅助模式(AAT)下,个体主动完成动作,如果动作在速度、时间或力度方面表现较差,机器人会进行干预。在阻力模式下,机器人的力与个体的运动方向相反,使得运动更加困难。这项随机对照试验旨在比较RET和AAT两种模式下机器人康复方法治疗中度损伤的脑卒中患者的效果。为控制变量,使用相同的康复机器人对患者进行康复训练。
2、研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
将34例中度脑卒中患者随机分为实验组(RET, n = 18)和对照组(AAT, n = 16),两组均进行机器人辅助治疗,每周5天,每次30分钟,持续4周,共20次机器人辅助训练。使用相同的康复机器人 InMotion ARM 对RET组进行阻力模式康复训练,对AAT组进行主动式辅助康复。RET组机器人对参与者的预期运动提供阻力,包含两种类型的训练: 如下图1所示,参与者被要求在圆周围的8个目标之间进行前后运动(等张阻力练习),或者保持手臂对抗远离中心圆的机器人力量(等长阻力练习)。参与者在一组训练中交替进行等张训练和等长训练。机器人程序的嵌入式控制算法根据之前的治疗阶段确定阻力大小,为参与者提供个性化的合适阻力(7 N - 28 N)。
实验主要测量结果涵盖了国际功能、残疾和健康分类所定义的三个范畴——身体功能和结构、活动、参与,在机器人干预前(T0)进行初步评估(机器人运动学评估和临床评估)。第 10 次训练后,使用机器人评估进行中期测试(T1)。第 20 次训练后,以与初始评估相同的方式进行最终评估(T2)。机器人在控制被试肩关节和肘关节在水平面上的屈伸运动的同时,记录位置、方向、距离、时间、施加的力等运动学参数。进行了点对点(向目标移动80次)、画圆(一组4次试验,总共20个圆)、等距静态和圆形动态(分别向目标移动16次)评估测试,获得了运动学变量。
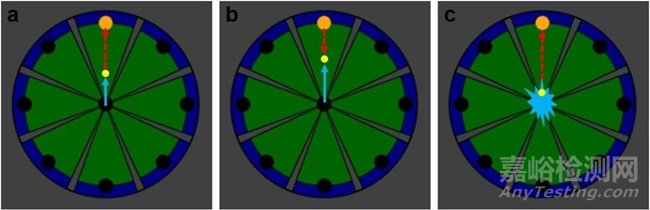
图1:每种训练模式的示意图
(图片来自原文)
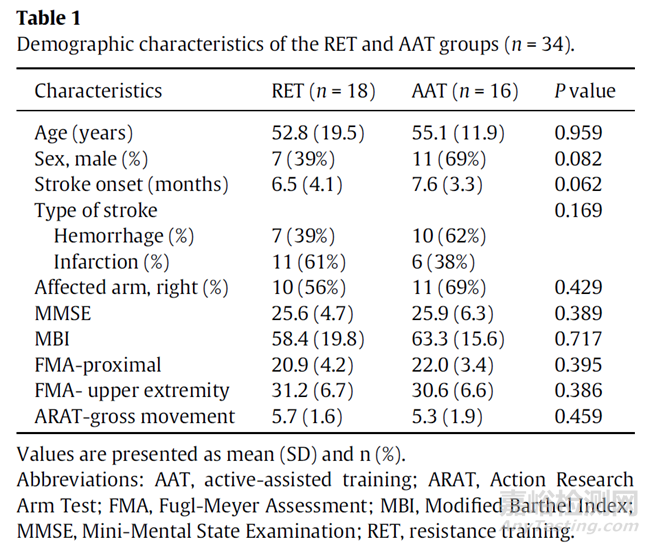
在统计学分析和数据处理后,发现两组之间的基线特征无显著差异(表1)。得出的研究成果分为三级:
1)主要结果:机器人点对点任务时的平滑度,用来衡量机器人治疗效果。
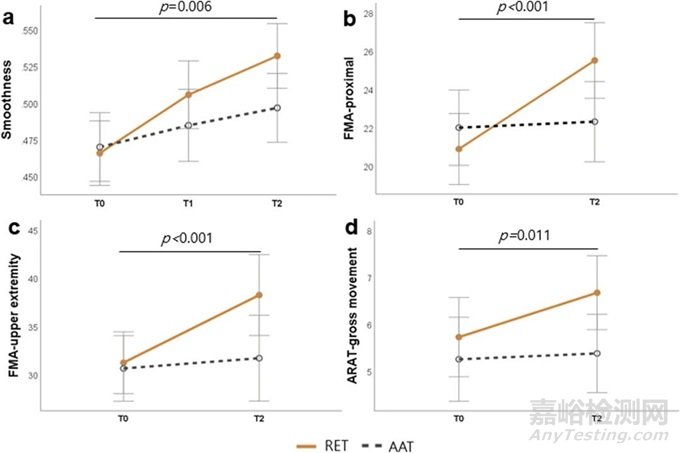
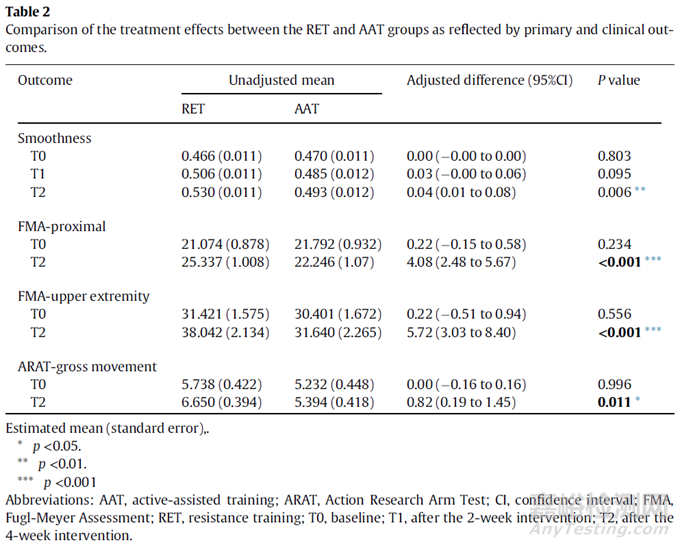
在T2时,RET组的平滑度比AAT组增加更多,因此相对于AAT组的组间均值差异为0.04 (p = 0.006;95%CI = 0.01 ~ 0.08)(图2,表2)。在T1时,组间差异不显著(估计组间均值差异为0.03;p = 0.095;95%CI = -0.00 ~ 0.06)。
表1:RET组和AAT组的特征差异
(表格来自原文)
图2:机器人治疗效果的比较
(图片来自原文)
2)次要结果包括如下一些临床评估量表:测量干预4周后,FMA-上肢 (t = -4.480;p < 0.001;95%Cl = -8.379 ~ 3.051),FMA-近端 (t = -5.410;p < 0.001;95%CI = -5.654 ~ -2.499),ARAT-总运动 (t = -2.722;p = 0.012;95%CI = -1.441 ~ -0.198) 显示RET组比AAT组改善更大。包含脑卒中后时间作为协变量的线性混合模型也显示,FMA-上肢、FMA-近端和ARAT-总运动评分的估计平均差异显著(表2)。
表2:RET组和AAT组治疗效果显著性差异
(图片来自原文)
3)第三级结果:测量脑卒中影响量表SIS得分,使用线性混合模型估计了RET组和AAT组的运动学平均差值。无论是t检验还是线性混合回归,组间均值差异均未达到统计学意义。在校正卒中后时间后,T2时RET组的位移和关节独立性明显高于AAT组。其他运动学变量组间无差异。
总体结果: RET比AAT在平滑度方面有更大的改善(p = 0.006)。FMA-上肢(p < 0.001),FMA-近端(p < 0.001),ARAT-总运动(p = 0.011),关节独立性的运动学变量(p = 0.017)和位移(p = 0.011)在RET组干预结束时也有更多的改善。
结论:在中度脑卒中患者中,机器人RET在改善上肢功能、结构和活动方面比AAT更有效。
3、研究意义
在机器人康复中应用合适的模式是很重要的。康复机器人大多被编程为协助启动或指导运动,根据损伤程度,适当的帮助对于恢复是必不可少的。研究结果表明,RET比AAT更能改善中度损伤脑卒中患者的上肢功能、结构和活动。RET后的有利效果可能来自于运动控制的改善和力量的增加,这些能转化为身体功能和活动的改善。考虑到上肢功能水平,需要机器人康复采用最佳的辅助和阻力。根据本研究的发现,辅助训练适用于严重损伤的脑卒中患者,而阻力式康复RET可能更适合于损伤较小且肌肉力量充足的患者。
参考文献:Jeon S Y, Ki M, Shin J-H. Resistive versus active assisted robotic training for the upper limb after a stroke: A randomized controlled study [J]. Annals of Physical and Rehabilitation Medicine, 2024, 67(1): 101789. DOI:10.1016/j.rehab.2023.101789.