整车控制器是电动汽车正常行驶的控制中枢,是整车控制系统的核心部件,是纯电动汽车的正常行驶、再生制动能量回收、故障诊断处理和车辆状态监视等功能的主要控制部件。
整车控制器包括硬件和软件两大组成部分,它的核心软件和程序一般由生产厂商研发,而汽车零部件供应商能够提供整车控制器硬件和底层驱动程序。现阶段国外对纯电动汽车整车控制器的研究主要集中在以轮毂电机驱动的纯电动汽车。对于只有一个电机的纯电动汽车通常不配备整车控制器,而是利用电机控制器进行整车控制。国外很多大企业都能够提供成熟的整车控制器方案,如大陆、博世、德尔福等。
1. 整车控制器组成与原理
纯电动汽车整车控制系统主要分为集中式控制和分布式控制两种方案。
集中式控制系统的基本思想是整车控制器独自完成对输入信号的采集,并根据控制策略对数据进行分析和处理,然后直接对各执行机构发出控制指令,驱动纯电动汽车的正常行驶。集中式控制系统的优点是处理集中、响应快和成本低;缺点是电路复杂,并且不易散热。
分布式控制系统的基本思想是整车控制器采集一些驾驶员信号,同时通过CAN总线与电机控制器和电池管理系统通信,电机控制器和电池管理系统分别将各自采集的整车信号通过CAN总线传递给整车控制器。整车控制器根据整车信息,并结合控制策略对数据进行分析和处理,电机控制器和电池管理系统收到控制指令后,根据电机和电池当前的状态信息,控制电机运转和电池放电。分布式控制系统的优点是模块化和复杂度低;缺点是成本相对较高。
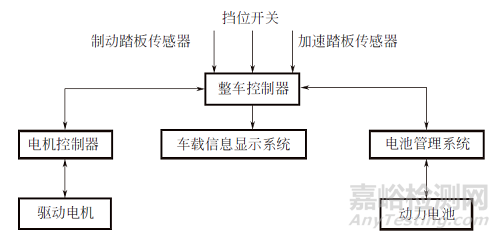
典型分布式整车控制系统示意图如下图所示,整车控制系统的顶层是整车控制器,整车控制器通过CAN总线接收电机控制器和电池管理系统的信息,并对电机控制器、电池管理系统和车载信息显示系统发送控制指令。电机控制器和电池管理系统分别负责驱动电机和动力电池组的监控与管理,车载信息显示系统用于显示车辆当前的状态信息等。
典型分布式整车控制系统示意图
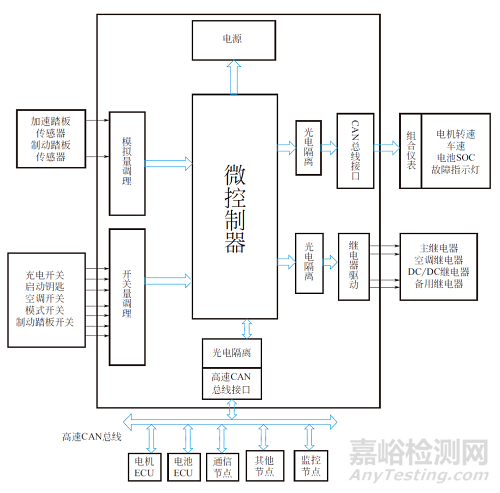
下图为某公司开发的纯电动汽车整车控制器组成原理图。整车控制器的硬件电路包括微控制器、开关量调理、模拟量调理、继电器驱动、高速CAN总线接口、电源等模块。
某公司开发的纯电动汽车整车控制器组成原理图
(1)微控制器模块
微控制器模块是整车控制器的核心,综合考虑纯电动汽车整车控制器的功能及其运行的外界环境,微控制器模块应该具有高速的数据处理性能、丰富的硬件接口、低成本和可靠性高的特点。
(2)开关量调理模块
开关量调理模块用于开关输入量的电平转换和整型,其一端与多个开关量传感器相连,另一端与微控制器相接。
(3)模拟量调理模块
模拟量调理模块用于采集加速踏板和制动踏板的模拟信号,并输送给微控制器。
(4)继电器驱动模块
继电器驱动模块用于驱动多个继电器,其一端通过光电隔离器与微控制器相连,另一端与多个继电器相接。
(5)高速CAN总线接口模块
高速CAN总线接口模块用于提供高速CAN总线接口,其一端通过光电隔离器与微控制器相连,另一端与系统高速CAN总线相接。
(6)电源模块
电源模块为微处理器和各输入、输出模块提供隔离电源,并对蓄电池电压进行监控,与微控制器相连。
整车控制器对电动汽车动力链的各个环节进行管理、协调和监控,以提高整车能量利用效率,确保安全性和可靠性。整车控制器采集驾驶员驾驶信号,通过CAN总线获得驱动电机和动力电池系统的相关信息,进行分析和运算,通过CAN总线给出电机控制和电池管理指令,实现整车驱动控制、能量优化控制和制动能量回收控制。整车控制器还具有综合仪表接口功能,可显示整车状态信息;具备完善的故障诊断和处理功能;具有整车网关及网络管理功能。
2. 整车控制器基本功能
整车控制器通过采集加速踏板信号、制动踏板信号和挡位开关信号等驾驶信息,同时接收CAN总线上电机控制器和电池管理系统发出的数据,并结合整车控制策略对这些信息进行分析和判断,提取驾驶员的驾驶意图和车辆运行状态信息,最后通过CAN总线发出指令来控制各部件控制器的工作,保证车辆的正常行驶。整车控制器应该具备以下基本功能。
(1)对汽车行驶控制的功能
电动汽车的驱动电机必须按照驾驶员意图输出驱动或制动转矩。当驾驶员踩下加速踏板或制动踏板时,驱动电机要输出一定的驱动功率或再生制动功率。踏板开度越大,驱动电机的输出功率越大。因此,整车控制器要合理解释驾驶员操作;接收整车各子系统的反馈信息,为驾驶员提供决策反馈;对整车各子系统的发送控制指令,以实现车辆的正常行驶。
(2)整车的网络化管理
整车控制器是电动汽车众多控制器中的一个,是CAN总线中的一个节点。在整车网络管理中,整车控制器是信息控制的中心,负责信息的组织与传输、网络状态的监控、网络节点的管理以及网络故障的诊断与处理。
(3)对制动能量的回收
纯电动汽车区别于内燃机汽车的重要特征就是能够进行制动能量回收,这是通过将纯电动汽车的电机工作在再生制动状态来实现,整车控制器分析驾驶员制动意图、动力电池组状态和驱动电机状态等消息,并结合制动能量回收控制策略,在满足制动能量回收的条件下对电机控制器发送电机模式指令和转矩指令,使得驱动电机工作在发电模式,在不影响制动性能的前提下将电制动回收的能量储存在动力电池组中,从而实现制动能量回收。
(4)整车能量管理和优化
在纯电动汽车中,动力电池除了给驱动电机供电以外,还要给电动附件供电,因此,为了获得最大的续驶里程,整车控制器将负责整车的能量管理,以提高能量的利用率。在电池的SOC值比较低的时候,整车控制器将对某些电动附件发出指令,限制电动附件的输出功率,来增加续驶里程。
(5)对车辆状态的监测和显示
整车控制器通过直接采集信号和接收CAN总线上的数据的方式获得车辆运行的实时数据,包括速度、电机的工作模式、转矩、转速、电池的剩余电量、总电压、单体电压、电池温度和故障等信息,然后通过CAN总线将这些实时信息发送到车载信息显示系统进行显示。此外整车控制器定时检测CAN总线上各模块的通信,如果发现总线上某一节点不能够正常通信,则在车载信息显示系统上显示该故障信息,并对相应的紧急情况采取合理的措施进行处理,防止极端状况的发生,使得驾驶员能够直接、准确地获取车辆当前的运行状态信息。
(6)故障诊断与处理
连续监测整车电控系统,进行故障诊断。故障指示灯指示出故障类别和部分故障码。根据故障内容,及时进行相应安全保护处理。对于不太严重的故障,能做到低速行驶到附近维修站进行检修。
(7)外接充电管理
实现充电的连接,监控充电过程,报告充电状态,充电结束。
(8)诊断设备的在线诊断和下线检测
负责与外部诊断设备的连接和诊断通信,实现UDS诊断服务,包括数据流的读取,故障码的读取和清除,控制端口的调试。
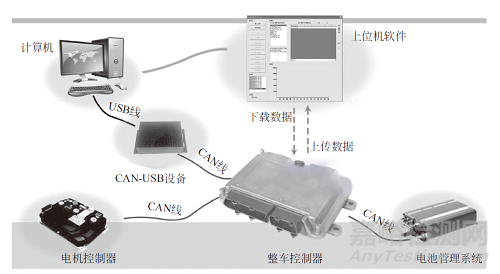
下图是纯电动汽车整车控制器实例,它通过采集行车及充电过程中的控制信号,判断驾驶员意图,通过CAN总线对整车电控设备进行管理和调度,并针对不同车型采用不同的控制策略,实现整车驱动控制、能量优化控制、制动能量回收控制和网络管理。整车控制器运用了微型计算机、智能功率驱动、CAN总线等技术,具有动态响应好、采样精度高、抗干扰能力强、可靠性好等特点。
纯电动汽车整车控制器实例
3. 整车控制器设计要求
直接向整车控制器发送信号的传感器包括加速踏板传感器、制动踏板传感器和挡位开关,其中加速踏板传感器和制动踏板传感器输出模拟信号,挡位开关输出信号是开关量信号。整车控制器通过向电机控制器、电池管理系统发送指令间接控制驱动电机运转和动力电池充放电,通过控制主继电器来实现车载模块的通断电。
根据整车控制网络的构成以及对整车控制器输入和输出信号的分析,整车控制器应满足以下技术要求。
① 设计硬件电路时,应该充分考虑电动汽车的行驶环境,注重电磁兼容性,提高抗干扰能力。整车控制器在软硬件上都应该具备一定的自保护能力,以防止极端情况的发生。
② 整车控制器需要有足够多的I/O接口,能够快速、准确地采集各种输入信息,至少具备两路A/D转换通道用于采集加速踏板信号和制动踏板信号,应该具有多个开关量输入通道,用于采集汽车挡位信号,同时应该具有多个用于驱动车载继电器的功率驱动信号输出通道。
③ 整车控制器应该具备多种通信接口,CAN通信接口用于与电机控制器、电池管理系统和车载信息显示系统通信,RS232通信接口用于与上位机通信,同时预留了一个RS-485/422通信接口,这可以将不支持CAN通信的设备兼容,例如某些型号的车载触摸屏。
④ 不同路况条件下,汽车会遇到不同的冲击和振动,整车控制器应该具备良好的抗冲击性,才能保证汽车的可靠性和安全性。