您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2022-10-18 14:15
前言导读
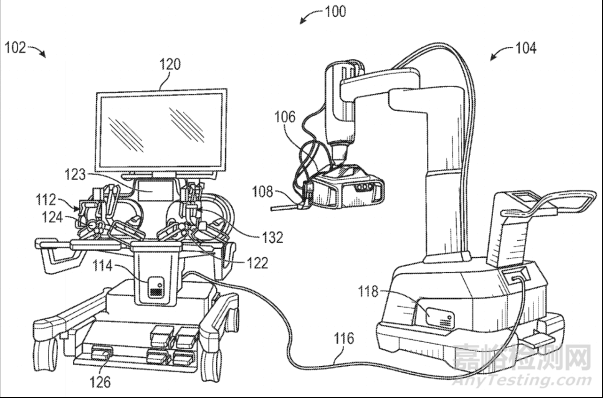
手术机器人是一种先进的医疗设备,借助微创伤手术及相关底层技术的发展而发明。手术机器人被用于在高于人类能力的微创伤手术领域中实现高于人类能力的对手术器械的精准操控。手术机器人通常由手术控制台、配备机械臂的手术车及视像系统组成。外科医生坐在手术控制台,观看由放置在患者体内腔镜传输的手术区域三维影像,并操控机械臂的移动,以及该机械臂附带的手术器械及腔镜。机械臂模拟人类的手臂,为外科医生提供一系列模拟人体手腕的动作,同时过滤人手本身的震颤。
机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床上外科上有大量的应用。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
经过数十年发展,手术机器人现在主要用于五个快速增长的主要外科领域,其中的腔镜、骨科、介入手术机器人是及其重要的一个版块。
手术机器人市场概览
当前,随着人工智能、物联网等新科技的快速渗透,医疗健康正在与机器人全面融合,引领外科技术大变革。手术机器人行业迎来快速发展,赛道火热,备受资本青睐。
根据Frost & Sullivan的统计,2020 年全球机器人手术市场规模为 61 亿美元,预计从 2021 年到 2028 年将以 17.60% 的复合年增长率增长,到 2028 年将达到 222.7 亿美元(折合人民币约为1414亿元)。
我国手术机器人市场发展迅猛,根据Frost & Sullivan的统计,市场规模由2016年的人民币853.6百万元增至2020年的人民币2,934.5百万元,年复合增长率达36.2%,预计2030年中国手术机器人的市场规模将达至人民币58,425.9百万元,年复合增长率为34.9%。
手术机器人是将机器人技术应用在医疗领域,显然的,机器人手术是使用机器人系统完成的外科手术类型,机器人辅助手术的开发旨在克服现有的微创手术程序的局限性,并增强外科医生进行开放手术的能力。
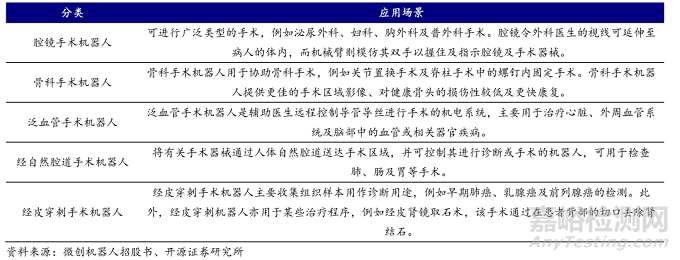
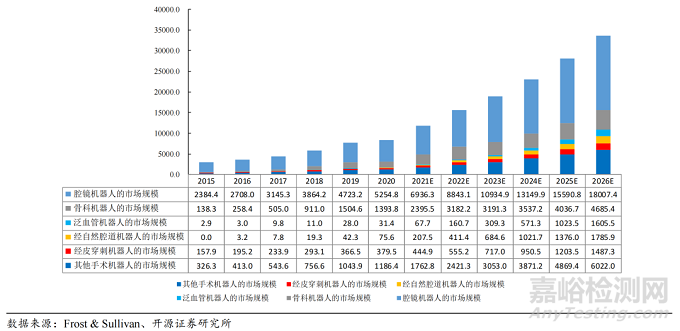
手术机器人集成了医学、材料学、自动控制学、数字图像处理学、生物力学、机器人学等诸多学科为一体的新型交叉科学。一般情况下,从临床医学应用角度可将手术机器人主要分为腔镜手术机器人、骨科手术机器人、泛血管手术机器人、 经自然腔道手术机器人、经皮穿刺手术机器人。
下面两幅附图分别给出了各主要细分手术机器人的应用场景和市场规模情况,供各位读者参考。
笔者认为,随着时间发展,对于国内手术机器人市场而言,各大厂商会面临如下5个方面的竞争,分别为:
1.技术战,入局者众多,内卷严重,而且在技术上目前国外先进巨头具有一定优势,国内厂家只有通过技术上“高人一等”才能“脱颖而出”。
2.临床战,目前手术机器人虽然种类繁多,但是依然是医械法规强监管的产业,且市场受众面以大城市的大医院为主体,在如此众多的品牌上市过程中,临床资源就显得弥足珍贵。
3.融资战,手术机器人是一个多学科高度集中的产品,研发周期长,临床要求高,各方面人力资源也紧张稀缺,必然需要高额的投入,这些都需要大量的资本投入,因此手术机器人的玩法从资本市场来讲其实就是“谁的资本强谁成功率大”。
4.营销战,随着国内、国外厂商的产品逐步上市,需要“卖出去”,也需要市场各群体的认同,更需要占据市场率,因此在众多同类型同适应症的手术机器人中“卖得好”才是各大厂商的终极目标,才是“长久之计”。
5.专利战,专利对于手术机器人而言十分重要,当然也是技术层面的演化,更是各大手术机器人厂商市场角力的重要武器,甚至是“终极核武”,规避设计风险、占据市场率都需要专利的辅助,达芬奇在腔镜机器人领域“叱咤风云”恰恰是得益于专利。
Titan概览
Enos腔镜手术机器人由Titan Medical研发,是一套单孔手术机器人系统,Titan Medical成立于2018年。
Titan Medical手术机器人的专利和专利申请已超过200项,这一重要里程碑展现了公司致力于成为单孔机器人辅助手术的创新领导者。广泛的专利组合保护了公司的专有技术,并支持其推动更好的患者疗效、提供成本效益和提高医院效率的使命。目前,Titan已通过预付费许可交易授权给第三方大约1/3的专利,大多与机器人辅助器械、内窥镜摄像头和相关驱动系统技术相关。Titan完整专利组合所涵盖的所有技术都可能被用于其Enos系统。
下图给出了Enos手术机器人的产品实物示意。
专利分析
笔者针对Titan Medical机器人所涉及的专利情况,进行了检索,其结果进行如下展示:
专利概览
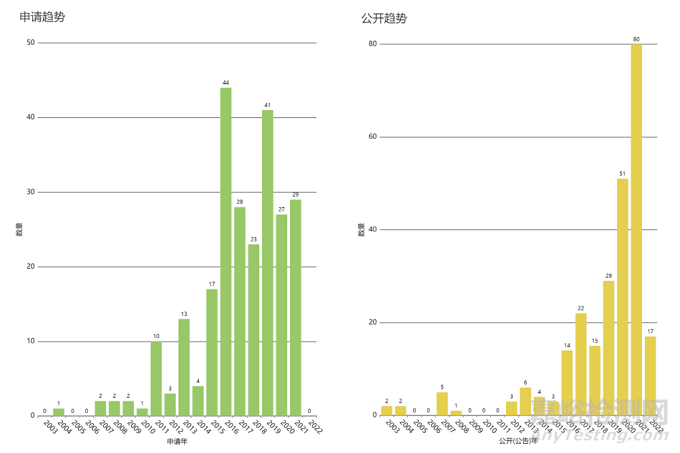
下图给出Titan Medical公司专利的申请和公开情况。
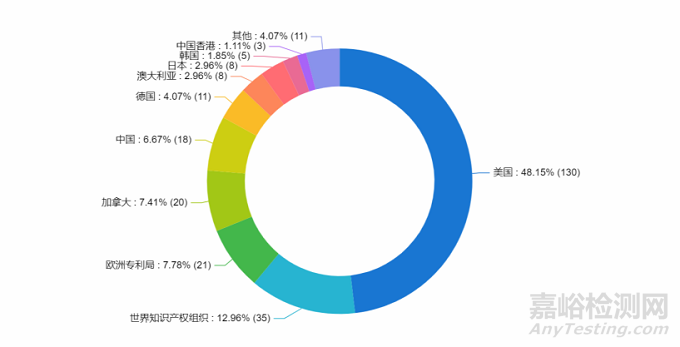
下面两幅图给出了Titan Medical专利布局情况,可以非常明确得到达Titan Medical的专利地域布局情况,其专利申请目标国主要聚集于美国、欧洲、加拿大、中国等区域性中心国家或地区。
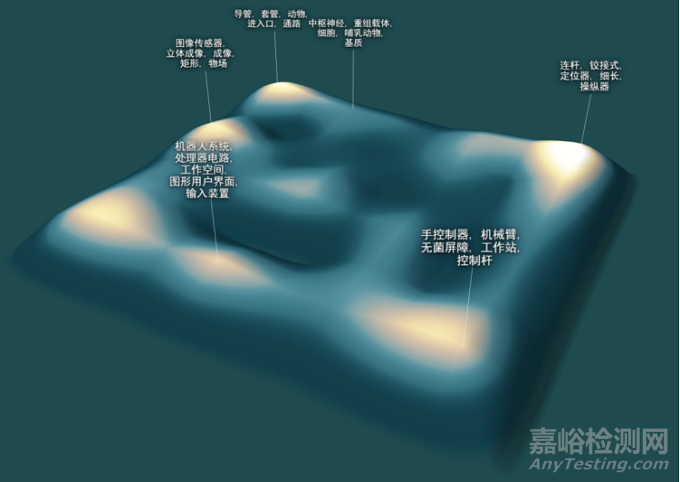
下图给出了Titan Medical公司相关专利的专利地图情况,从该专利地图可以很明了的得到Titan Medical公司相关专利的技术分支情。
重点专利
笔者对Titan Medical手术机器人的相关专利根据类别分别进行了整理和剖析,这里笔者从众多专利中选择了若干进行了解析,相关相关结果如下:Titan Medical手术机器人的完整专利清单和分析笔者也已开展完成,如感兴趣可以与笔者取得联系,共同交流学习:
1
|
公开/公告号 |
US10758311B2
|
申请日 |
2018-10-30
|
|
发明名称 |
Hand controller apparatus for gesture control and shared input control in a robotic surgery system
|
||
|
解决的技术问题 |
Robotic systems have been employed to help reduce tedious and time consuming processes. Many of the current robots used in surgical applications are specifically intended for magnifying/steadying surgical movements or providing a template for milling the bone surface. However, these robots are suboptimal for drilling holes and other related tasks.
|
||
|
技术方案 |
In some embodiments, a hand controller apparatus for controlling a tool in a robotic surgery system can include a body configured to be moved to generate a first operator input to cause a tool to move corresponding to the movement of the body. The hand controller apparatus can also include an input control interface formed on a surface of the body and configured to sense one or more of a plurality of second operator inputs associated with a plurality of tool functions, the plurality of second operator inputs being different from the first operator input. The hand controller apparatus can also include a processor configured to control the tool to perform one or more of the plurality of tool functions in response to the sensed one or more second operator inputs.
|
||
|
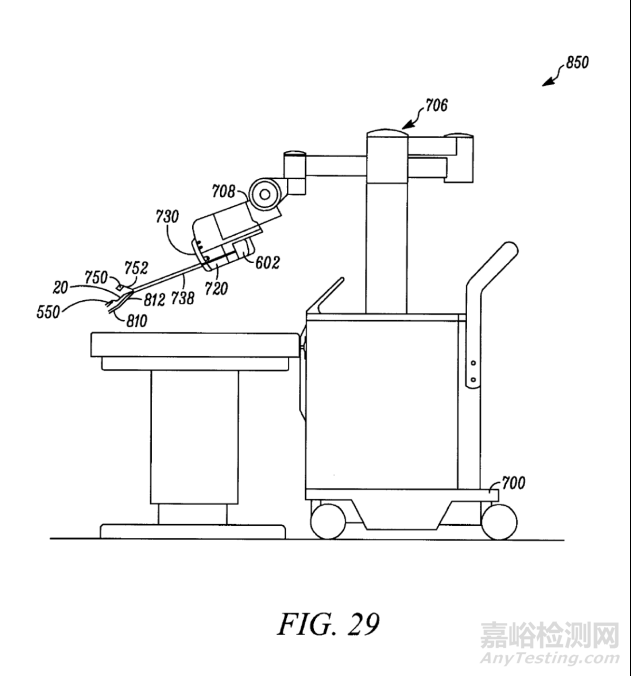
相关附图 |
|
||
2
|
公开/公告号 |
US10278683B2
|
申请日 |
2013-12-20
|
|
发明名称 |
Articulated tool positioner and system employing same
|
||
|
解决的技术问题 |
The present invention provides an alternative articulated tool positioning apparatus that avoids the need for springs biasing articulated segments into a straight position through the use of cables capable of tension and compression connecting terminating members between articulating links, thereby supporting both pushing and pulling on the cables and providing for simpler assembly.
|
||
|
技术方案 |
An articulated tool positioning apparatus comprising a base member, an intermediate member, an end member and a first tool holder arranged in succession, each of the base member, intermediate member, end member and tool holder having a respective central opening. A first plurality of coupled guides id positioned between the base member and the intermediate member and a second plurality of coupled guides is positioned between the intermediate member and the end member. A third plurality of coupled guides is diposed between the end member and the tool holder. The base member, intermediate member, end member, first tool holder and first second and third pluralities of coupled guides all have a central opening and guide openings or securing points for securing pluralities of flexible control links to the base member or to an object separated from the base member. Pushing or pulling control links of a first plurality of control links causes the base member, the first plurality of coupled guides, the intermediate member, the second plurality of coupled guides and the end member to selectively define a continuous curve. A second plurality of control links causes the end member to maintain an orientation generally the same as the base member, when any of the other flexible control links is pushed or pulled. Pushing or pulling control links of a third plurality of control links causes the tool holder to be selectively moved into any of a plurality of orientations, such that the third plurality of coupled guides between the end member and the tool holder defines a continuous curve from the end member to the tool holder. At least one mechanism for pushing and pulling the flexible control links is described and a use of the apparatus for positioning a tool for laparoscopic surgery applications is described. |
||
|
相关附图 |
|
||
结 语
诚如领域内人士共同认识的那样,手术机器人逐渐赢得市场追捧,站上了智能精细化发展、医保政策利好的快车道,全球以及国内各大手术机器人厂商也必会将达芬奇、美敦力、强生、CMR等作为重要的标杆和对照,联动产学研医生多方力量,不断创新,推动中国手术机器人行业更智能化、精准化、微创化的发展,相关知识产权问题也必将会成为各大手术机器人厂商的研究重点课题,后续相关产品的的研发和专利事务值得持续关注。
来源:医械知识产权