您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2020-12-30 09:14
水下航行器设计型式繁多,技术密集度高,属于公认的高技术领域,是当今世界各国研究工作的热点。如今随着人工智能、计算机与微电子技术的迅猛发展,水下航行器向着尺寸小、重量轻、造价低、集成化、模块化的目标前进。小型水下航行器体积小、重量轻,便于存储、布放和回收,具有环境适应能力强、活动范围大、应用领域广泛等诸多优势。在军事上,随着近代高新技术的飞跃发展,水下武器装备已经融合了火箭、鱼雷、导弹、现代信息技术,具备自航、自导等功能。
由于水下航行器信息化发展,其携带了大量电子设备,其可靠性由于所处的特殊环境将面临波浪、海流、泥沙、盐雾等影响。电子设备可靠性模型和预计是相对较新的学科,诞生于第二次世界大战中,应对复杂的电子设备高失效率时,可靠性才作为一个学科进行研究。在上个世纪八十年代以前,指数分布或常失效率模型作为唯一可用的电子元器件可靠性预计模型,其代表是美国国防部发布的MIL-HDBK-217,此外的GJB 299等可靠性预计标准也采用同样的模型。在MIL-HDBK-217基础上,发展了其它的预计方法,如通信领域的Telcordia SR-332,民用设备的RDF-93和RDF-2000,航空和军用领域的FIDES guide 2009[8]等可靠性模型。本文基于FIDES模型,该模型为基于失效物理的可靠性模型,统一实现了对工作状态和非工作状态电子设备可靠性进行预计,同时,该模型中的应力加速模型除温度应力和电应力外,还采用机械应力、温湿度、温度循环等应力加速模型,结合综合应力剖面建立,可以更精确的反映电子设备寿命周期内环境应力对产品可靠性的影响。
可靠性仿真设计及结果
1 、基于失效物理的可靠性仿真方法
采用现有的基于失效物理的可靠性方法进行可靠性仿真。其中温度加速模型采用Arrhenius模型,温循应力采用Norris-Landzberg模型、湿度应力采用Peck模型、机械振动应力采用Basquin模型、电应力采用与温度应力联合的电压降额指数模型。化学应力主要考虑盐雾等污染水平的强弱进行影响分级的方法进行考虑。
2 、研究对象
该电子设备为水下航行器控制计算机,用于进行多信号识别和综合判断,主要器件包括CPU、存储器、FPGA、译码器等集成电路、连接器、电阻、电容、二极管等453个器件组成。
3 、任务环境
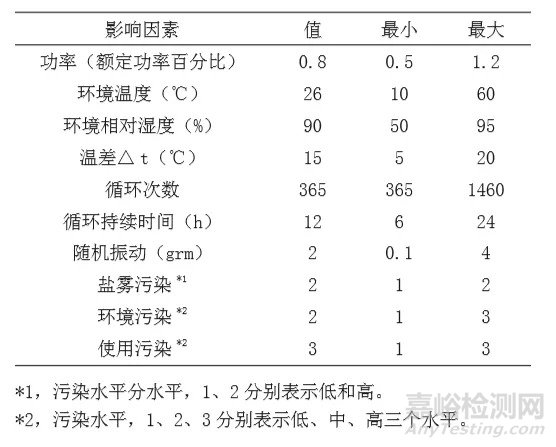
针对计算机板进行电子设备可靠性预计分析,在日历寿命8760h和开机状态下,针对功率、环境温度、相对湿度、温差、循环次数、循环持续时间、随机振动、盐雾污染水平、环境污染水平、使用污染水平等10个环境因素对可靠性失效率影响进行分析。结合该设备实际使用环境,该设备任务环境剖面应力范围如表1所示。
表1 任务剖面环境应力水平
4 、仿真试验设计
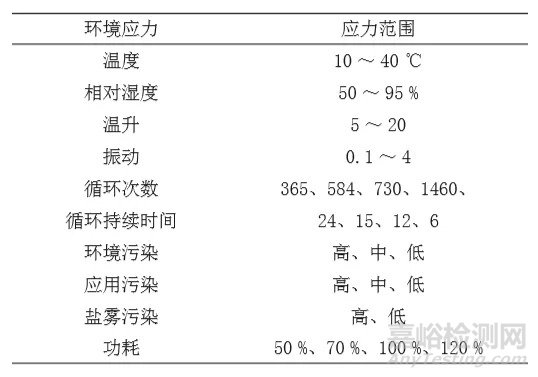
本次仿真试验的设计采用正交试验设计。正交试验设计是指研究多因素多水平的一种试验设计方法。根据正交性从全面试验中挑选出部分有代表性的点进行试验,这些有代表性的点具备均匀分散,齐整可比的特点。正交试验设计是分式析因设计的主要方法。当试验涉及的因素在3个或3个以上,而且因素间可能有交互作用时,试验工作量就会变得很大,甚至难以实施。正交试验设计的主要工具是正交表,试验可根据试验的因素数、因素的水平数以及是否具有交互作用等需求查找相应的正交表,再依托正交表的正交性从全面试验中挑选出部分有代表性的点进行试验,可以实现以最少的试验次数达到与大量全面试验等效的结果。结合应力范围,设计了不同影响因素的应力水平,如表2所示。
表 2 仿真试验环境参数水平设计
同时对于10因素一阶响应面建模需11组数据、二阶响应面建模需66组以上数据。为了满足10因素不同类型响应面建模,共设计76组仿真试验条件。
5、 仿真结果
通过正交试验设计,对不同环境应力参数进行拉偏,该失效物理方法可以分类出各影响因素和热、热循环、机械、热电等不同失效机理下引起的失效率,可靠性仿真结果如图1所。可以看出引起失效率大的失效机理主要为热和机械应力。
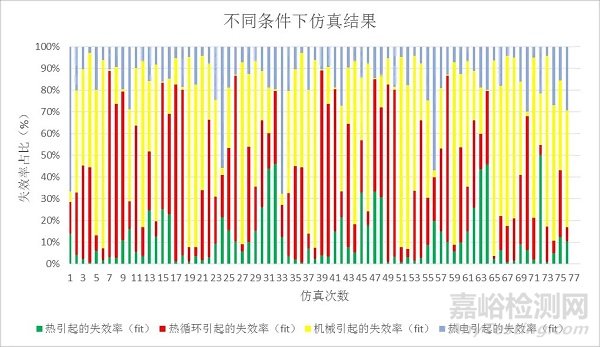
图1 76组不同条件下可靠性仿真结果
可靠性近似建模及分析
1 、近似建模方法
近似建模方法是通过数学模型的方法逼近输入量与输出量的方法。在可靠性预计中,由于计算参数多切复杂,为了快速评价不同环境对可靠性的影响,有必要在失效物理模型基础上进行近似建模,提高可靠性仿真效率,促进优化和改进设计。主要的近似模型有:(1)响应面模型,(2)Kriging模型,(3)径向基模型,(4)正交多项式模型等。其中公式(1)为一阶响应面模型,公式(2)为二阶响应面模型。
Kriging(克里格)又称空间局部插值法,以变异函数理论和结构分析为基础,在有限区域内对区域化变量进行无偏最优估计的一种方法。径向基模型为神经网络模型,正交多项式模型为切比雪夫多项式回归拟合。
本文采用响应面和Kriging近似模型进行环境因素对可靠性影响的对比分析,同时对以上四种方法的拟合误差进行了对比。
2 、不同近似建模影响趋势分析
从图2~4中各不同近似建模方法各单因素对失效率影响分析图可以看出,一阶响应面1阶模型分析的趋势居中、二阶响应面模型分析的趋势最保守、kriging趋势最小。
不同近似模型环境影响因素对失效率的影响如图2、图3、图4所示,可以看出一阶响应面模型为线性关系,其它两个模型为非线性模型。
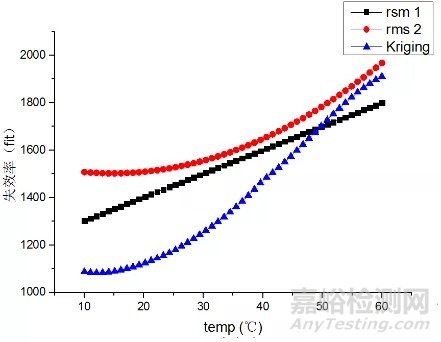
图2 不同近似建模方法温度对失效率影响
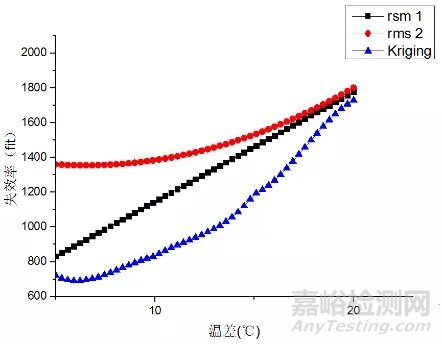
图3 不同近似建模方法温差对失效率影响
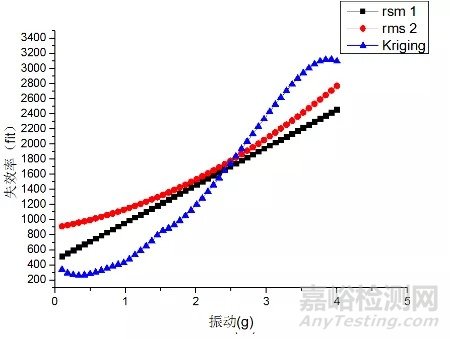
图4 不同近似建模方法振动对失效率
从图2、图3可以看出温度和温差对失效率影响,二阶响应面模型保守,一阶响应面居中,kriging较小。但振动对失效率影响当振动量级大于2.5grm时,kriging模型趋势超过其它两个模型。
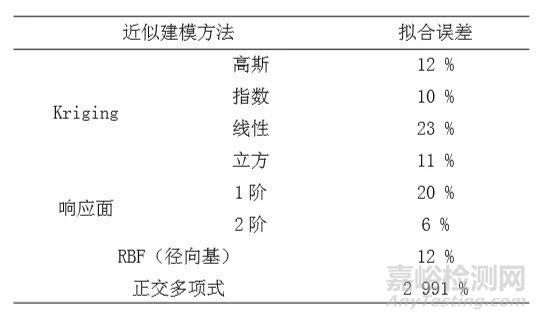
3 、建模误差分析
在功率(额定功率百分比)80%,环境温度26℃,相对湿度90%,温差15℃,年循环365次,循环持续时间12h,随机振动2grm,盐雾污染高等统一条件下,按照各自近似建模获得的模型对比分析其误差,如表3所示。对比分析的近似建模包括Kriging的高斯、指数、线性、立方等模型,响应面一阶、二阶模型,径向基神经网络模型和正交多项式模型,可以看出二阶响应面模型误差最小。
表3 近似建模误差
结论
本文针对水下航行器电子设备采用基于失效物理的可靠性方法进行了温度、相对湿度、温升、振动、功耗等10因素影响可靠性正交试验仿真,结合仿真结果进行了4种近似建模方法对比。可以获得以下结论。
(1)基于失效物理的可靠性预计方法在不同应力条件下可靠性结果不同,反映了其失效物理特性。
(2)二阶响应面模型相对kriging模型可靠性结果较保守。
(3)二阶响应面模型相对本文提到的近似模型,拟合误差最小。在误差接收范围内,可利用该方法建立电子设备在各环境影响下的可靠性模型,快速评估各环境对可靠性的影响,促进产品优化和改进设计。

来源:环境技术核心期刊


