您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2022-12-16 23:10
前言
严重的横膈膜功能障碍可导致呼吸衰竭,并需要永久性的机械通气。然而,通过口腔或气管切开术,并使用永久固定的机械呼吸机可能会阻碍患者的说话、吞咽能力和活动能力。因此,研究团队展示了在不同呼吸强度的猪模型中,植入膈膜上方的收缩软机器人驱动器在吸气时可以增强其运动。横膈膜辅助植入物与原生呼吸刺激的同步驱动增加了潮气量和吸气流量。植入物干预膈肌而不是上呼吸道,能够增加通气的生理指标,可以在不牺牲生活质量的情况下恢复呼吸性能。
背景
横膈肌是负责吸气的主要肌肉,占健康个体吸气潮气量的70%。膈肌功能障碍可由多种功能障碍引起,包括膈神经损伤和神经肌肉疾病。由于这些病因的退行性性质,使得患者通常会出现机械性呼吸衰竭。严重的膈肌功能障碍或瘫痪可导致慢性呼吸衰竭。当疾病进展超过无创治疗的治疗能力时,患者必须做出艰难的决定,选择通过气管切开术进行永久性有创通气,或在了解其疾病的最终本质后寻求姑息治疗。
有创通气可能会干扰患者生活质量的许多方面,如妨碍说话,需要全职护理,并可能需要患者进入护理机构。因此目前迫切需要治疗性通气的选择,在不牺牲生活质量的情况下恢复呼吸性能,特别是对于那些有最严重的横膈膜功能障碍的患者。
理想的软体机器人驱动器能够复制复杂的、重复的肌肉收缩,如隔膜,同时对生物组织无害。以前,完全植入的软体驱动器已经显示出了增强心脏功能的能力,而许多其他新开发的可植入式机器人也已经在广泛的生物应用中显示出了实用性。由于呼吸衰竭的机械性质,特别是在肌肉萎缩等情况的情况下,植入隔膜的软机器人驱动器有可能机械支持和增强其功能。以前研究软机器人应用于增强呼吸的工作很少,为数不多的例子之一是利用介电弹性体片用于完全取代切除的隔膜和产生运动。相比之下,研究团队的工作是在保持原有隔膜完好的情况下,增强了猪的相关生理指标(通气量,潮气量等)。
实验内容
1、软体机器人用于机械辅助隔膜运动
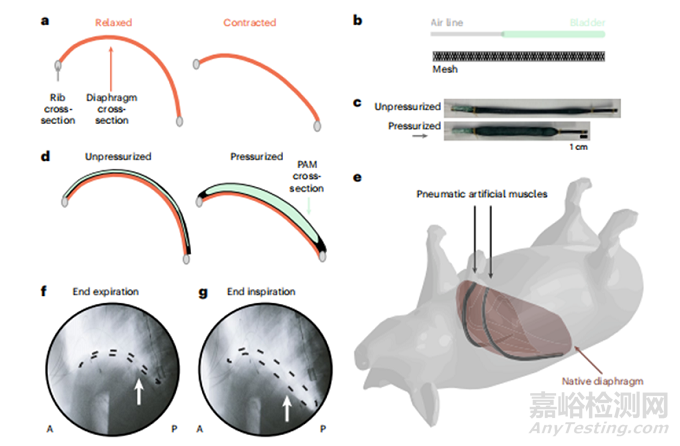
图1 a.在松弛(左)和收缩(右)状态下固定在肋骨上的天然隔膜的横向横截面示意图。b.PAM组件。c.单个PAM在无加压和加压状态下的样子。d.通过将PAMs置于隔膜上方来增加隔膜运动的横向横截面示意图。松弛状态未加压(左)状态,推动隔膜尾部处于加压(右)状态。e.在活猪模型中位于隔膜的PAMs(黑色)位置的可视化。f,g.在未加压(f)和加压(g)状态下使用 PAMs的体内猪隔膜的横向透视视图。驱动器的充气气球用虚线勾画出,并用箭头表示。A和P分别表示动物的前后方向。
如图1a所示,当隔膜收缩时,隔膜的弧度缩短,整个隔膜片向下移动,充当泵。胸腔容积增加,压力降低,最终驱动呼吸。
研究团队利用气动人工肌肉(PAMs)的收缩功能来模拟和增强横膈肌的自然收缩,选择了较为经典的McKibben型PAM。McKibben型PAM是由可伸缩的编织网,围绕着可通气的橡胶管构成(如图1b)。在本次研究组,PAM在20psi增压下可产生40N的收缩力。从理论上可以利用它的线性收缩来拟合天然隔膜的固有曲率。因此研究团队将PAM置于隔膜上方,末端固定于肋骨上(如图1d)。随着加压,PAM的长度缩短,PAM机械地向下推动隔膜。之后,研究团队通过手术将一对McKibben气动肌肉植入到活猪的体内位于心脏外侧的前后方向(如图1e)。在整个实验过程中都对膈肌进行了透视(图1f,g)。
在动物体实验中,研究团队模拟了动物的各类呼吸功能不全(如通过麻醉诱导呼吸抑制,通过切断膈神经诱导膈肌瘫痪)。通过超声(b型)断层成像显示PAM对隔膜的推动,监测其位移情况。(图2a,b)。为了量化设备和横膈肌的运动,采用了M型模式超声,该模式适用于进行运动分析。图2c,d记录了隔膜每次呼吸时的位移变化,不对PAM加压时,隔膜位移为0.37厘米。加压后,增加至1.92厘米。
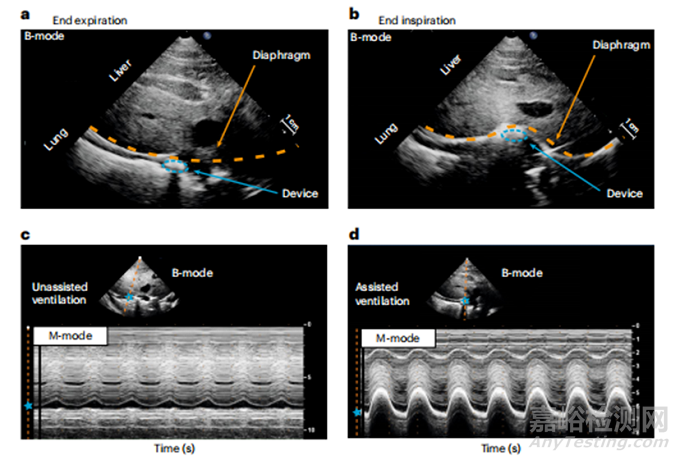
图2 a,b.隔膜的二维视图。a为松弛状态,b为加压状态。c.无辅助通气时的横膈膜运动状态。d.有辅助通气时的横膈膜运动状态。橙色虚线表示隔膜,蓝色虚线圆圈表示PAM横截面,蓝色星形表示隔膜的空间位置。
2、测量体内潮气量和吸气峰值流量
研究团队为了评估膈膜辅助系统增强呼吸功能的能力,使用仪器收集动物生理数据,包括呼吸系统内的呼吸流量、体积和压力。软体机器人驱动器的增压通过定制的控制系统进行控制,将与生理数据相同的驱动压力数据输入高分辨率数据采集系统。
通气是驱动二氧化碳交换的关键,因此我们首先测试了流量和容积波形作为衡量通气功能的标准。流量用肺活量仪测量,吸气峰值流量可作为吸气功能的临床指标,它可以直接展示出膈肌辅助系统的效果。将流量与时间积分,可以得到一个随时间变化的容积波形。每次呼吸量(潮气量)和呼吸频率(分钟通气量)是直接测量通气量的最相关参数。呼吸系统内的压力,如胸膜和腹腔压力,揭示了物理上驱动通气的呼吸系统生物力学的信息。
实验开始时,使用异氟醚对动物进行适当麻醉,并进行机械通气。异氟醚会引起呼吸抑制,使潮气量减少,呼吸频率增加。在整个植入手术中,机械通气被用来支持动物。研究团队对每个实验个体采取了一系列的呼吸测试,并在无辅助通气(其中任何自发的呼吸都是由于原始的呼吸驱动)和推杆辅助通气期间收集数据。机械通气被用来恢复和维持呼吸测试之后和之间的正常通气状态。在试验期间,所有的膈神经都是完好的。
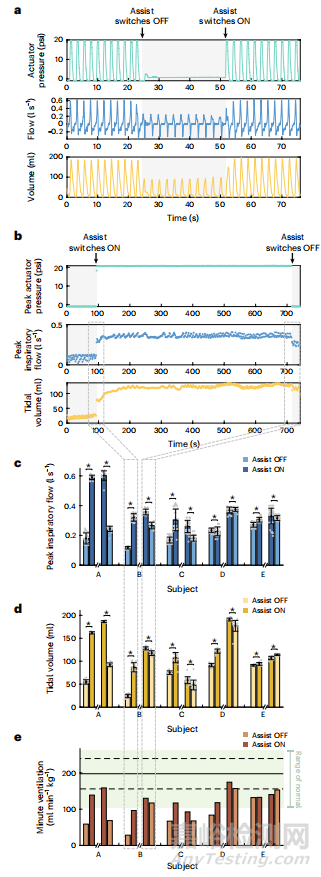
图3 a.记录实验的驱动压力变化,流量和潮气量。灰色区域表示隔膜辅助系统关闭时间。b.记录了一组峰值驱动压力,峰值吸气流量和潮气量。灰色区域表示隔膜辅助系统关闭时间。c,d.表示五个实验体在隔膜辅助系统开启(左侧)和关闭(右侧)前后30秒时的平均峰值吸气流量和潮气量的变化。e.记录了五个试验体在辅助系统开启和关闭前后30秒时的,体重标准化每分钟通气量,以及其相对于正常通气量(深色)的位置。
根据图3的结果表明,隔膜辅助系统可以显著提升实验体的吸气峰值流量和潮气量,在开启系统时通气量会有一个瞬时的跳跃,关闭时会略有下降,但明显高于未开启时。在五个实验体的实验中,不同实验体对辅助系统的反应性不同。实验体A的反应变化较为明显,其他实验体仅表现出了轻微反应甚至有了反效果(实验体E)。在进行体重标准化每分钟通气量的计算后,可以发现每个实验体在辅助系统的作用下,都达到了正常范围的低标准。
3、同步呼吸
与机械通气一样,在实验系统中,实验者与辅助系统的运动同步对增强呼吸能力至关重要,异步通气可能会破坏性地干扰原有的呼吸,导致使用辅助通气比不使用更糟糕。
为了使辅助系统的驱动与实验者的原有呼吸同步,研究团队建立了一个控制系统(如图4a,b)。该系统利用肺活量流量传感器采集实验者数据,根据流量设定了一个阈值,当流量超过阈值时,会发出一个流量脉冲发送到控制器中,控制器会触发一个加压和减压周期变化的压力波动,用于加压空缺填充以及清空PAMs。
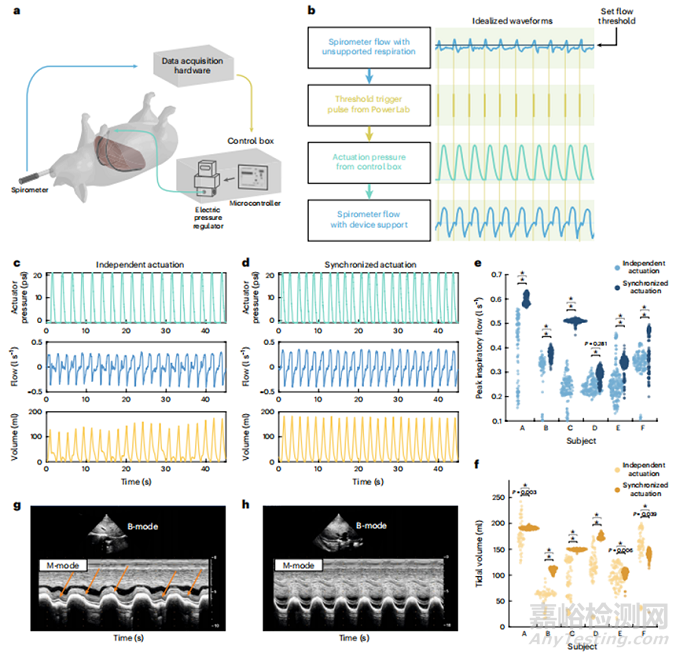
图4 a.控制系统原理图。b.一组理想的同步波形。c.代表使用独立驱动方式的驱动压力,流量和潮气量的波形数据。d.代表使用同步驱动方式的驱动压力,流量和潮气量的波形数据。e,f.表示六个实验者在独立驱动(浅色)和同步驱动(深色)产生的流量对比。g,h.表示独立驱动和同步驱动的M型超声分析。橙色箭头指向异步横膈肌收缩。
控制系统可以实现一套独立于实验体原有呼吸节奏的方案和与原有呼吸同步的方案。在图4c中,可以看出由于独立驱动模式与原有呼吸的节奏不匹配,在波形中反映出了混乱干扰。而图4d中的同步驱动方案的波形就更为均匀。从后面的结果中可以看出,独立驱动表现出的潮气量和流量的方差要要高于同步驱动。这是由于独立驱动干扰了原有的呼吸,使实验体呼吸发生了失调。从图4g中可以看出,独立驱动的隔膜收缩并不是均匀的波形。
总结
研究团队使用气动软机器人驱动器来支持和增强呼吸,演示了呼吸生理指标的急性增强和作为概念验证设备的可行性。在呼吸功能不全的大型动物模型中,一组手术植入膈膜上方的两组PAMs可以为膈膜提供机械支持。研究了其与呼吸系统和实验体的相互作用,并使用多模态指标来评估呼吸功能。
来源:和义广业创新平台


