导 语
近日,中国科学院自动化研究所侯增广医疗机器人团队李国涛等提出了一种膝关节外骨骼空间自对齐机制,实现了膝关节屈伸伸展和髋关节内旋外旋的同时运动辅助。针对人体与机器人关节轴线的不对齐问题,建立了膝关节外骨骼的运动学模型,证明了该外骨骼的运动相容性。提出了基于全局力矩操作度指数的膝关节外骨骼优化方法,提高了力矩传递能力。相关研究成果已发表在《IEEE Transactions On Neural Systems And Rehabilitation Engineering》中。
1、研究背景
传统膝关节外骨骼设计,通常将膝关节简化为一个简单的旋转关节,并未考虑人机关节轴的错位,这会对用户产生不良交互力,降低佩戴舒适度。自对齐机构是解决人机关节轴线错位问题的重要途经,但目前的设计都基于平面自对齐机构,其无法适应三维空间中膝关节的瞬时旋转中心,空间自对齐机构设计方法仍不清晰。软性外骨骼和刚柔混合外骨骼也可以用于提高穿戴舒适度,但是它们往往难以获得期望的载荷能力。因此,本研究专注于研究基于空间自对齐机构的刚性外骨骼机器人,以确保外骨骼既有足够的载荷能力,又具备良好的穿戴性能。
2、研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
膝关节外骨骼可以同时辅助膝关节的屈曲伸展和髋部的内旋外旋运动,也可以通过膝关节外骨骼完成二者的协同运动辅助。使用该膝外骨骼机器人有望拓展康复训练模式,增强下肢运动辅助的灵活性,以提高外骨骼的康复效果。因此,本研究设计了一款具有髋部内旋外旋功能的便携式膝关节外骨骼机器人。
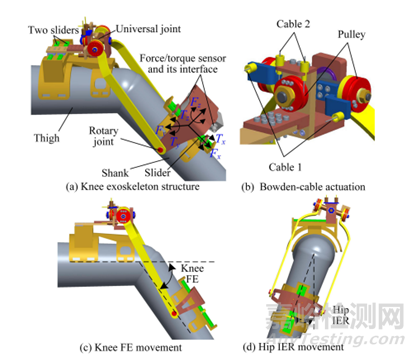
图1 膝关节外骨骼的设计。(a)和(b)为整体结构和驱动单元,(c)和(d)表示膝关节的屈曲伸展运动和髋部的内旋外旋运动。
图1给出了带有力矩传感器的膝关节外骨骼整体结构图。其中膝关节外骨骼由一个万向节、一个旋转关节、两个滑动关节和一个力矩传感器组成。为了增强结构强度,使用两个滑块构建了大腿上的滑动关节,并使用一个较大的滑块构建了小腿上的滑动关节。在膝关节外骨骼中,使用缆绳1和相应的两个滑轮来驱动与膝关节屈曲伸展相对应的万向节的旋转关节,而使用缆绳2和相应的滑轮来驱动与髋关节内旋外旋相对应的另一个旋转关节。
本研究通过实验证明了所提出的外骨骼在膝关节屈曲伸展和髋关节内旋外旋运动方面的性能。具体包括:运动学透明度验证、运动范围测试、相互作用力实验和运动辅助实验。
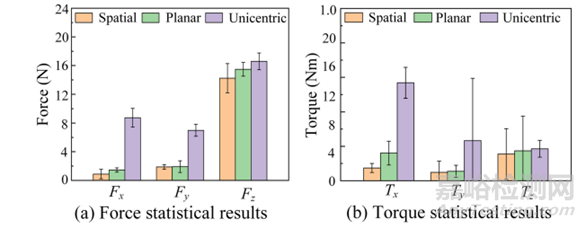
实验结果如下:图2给出了在辅助膝关节屈曲伸展运动期间的相互作用力和扭矩的实验结果。定义每个力/力矩的均值的绝对值为AM。定义三个力/力矩的AM平方和的算术平方根为力/力矩的SRAM。图3给出了三个外骨骼的AM的结果。相对基于平面自对齐机构的外骨骼机器人,所设计的膝关节外骨骼的Fx,Fy,Fz,Tx,Ty和Tz的AM分别降低了38.8%,2.0%,8.0%,53.7%,11.5%和10.6%;相对传统单轴外骨骼,降低了89.8%、73.1%、14.1%、87.0%、79.1%和16.3%。相对基于平面自对齐机构的外骨骼,所设计外骨骼机器人的力和力矩的SRAMs分别降低了8.1%和26.4%;相对传统单轴外骨骼,降低了28.1%和72.1%。
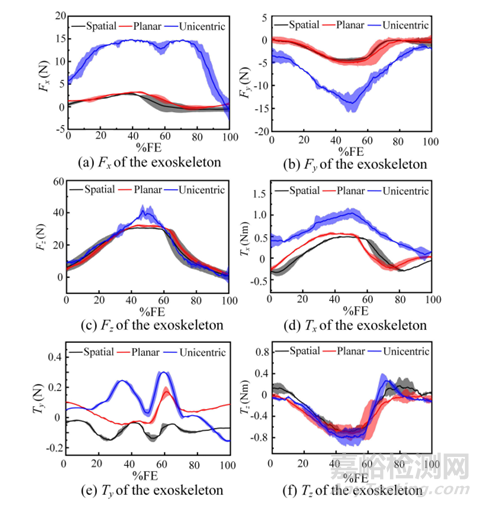
图2 膝关节屈曲伸展辅助的相互作用力和力矩实验结果。%FE表示任务进度的百分比。
图3 膝关节屈曲伸展运动辅助期间相互作用力和力矩的AM统计结果。
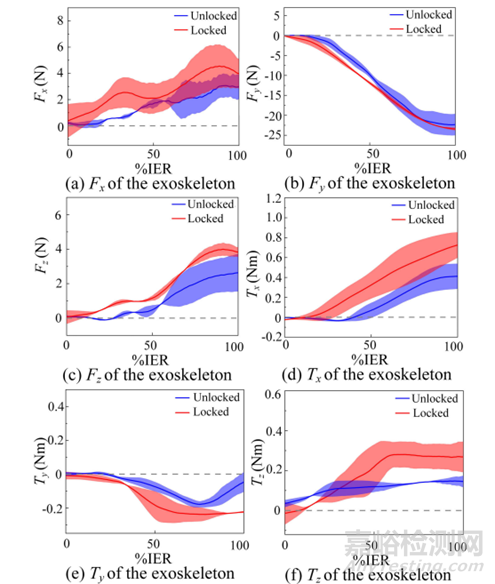
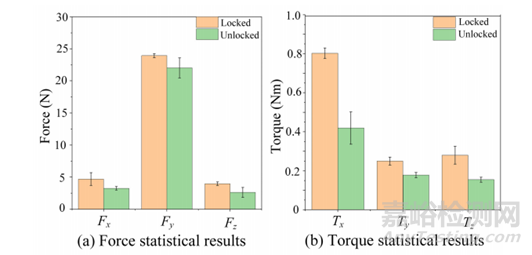
图4展示了髋关节内旋外旋运动辅助的实验结果,图5呈现了滑块解锁和滑块锁定状态下的AM结果。在滑块解锁状态下,开发的外骨骼的Fx,Fy,Fz,Tx,Ty和Tz的AM分别比锁定状态下低了30.5%,8.0%,33.7%,47.8%,28.6%和44.8%。相对滑块锁定状态,所设计的膝关节外骨骼在滑块解锁状态下的力和矩SRAM分别比锁定状态下低了6.4%和45.7%。实验结果表明,在膝关节屈曲伸展和髋关节内旋外旋运动两种运动辅助功能方面,所提出的外骨骼均比现有的外骨骼表现出更低的相互作用力和力矩。
图4,髋关节内旋外旋辅助的相互作用力和扭矩实验结果。%IER表示任务进度的百分比。
图5,在髋关节内旋外旋辅助期间相互作用力和力矩AM的统计分析结果。
3、研究意义
本研究专注膝关节外骨骼的机构设计及其运动辅助功能,所设计的膝关节外骨骼在运动学透明度、ROM、交互作用力/力矩以及运动辅助等方面,均展现出优越的性能,为设计一种能够在康复过程中同时辅助膝关节和髋关节运动的外骨骼康复机器人提供了新的思路。
参考文献:
G. Li, X. Liang, H. Lu, T. Su and Z. -G. Hou, “Development and Validation of a Self-Aligning Knee Exoskeleton With Hip Rotation Capability,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 32, pp. 472-481, 2024.