您当前的位置:检测资讯 > 行业研究
嘉峪检测网 2021-12-06 13:30
1、机构可靠性研究现状
在机构运动可靠性研究方面,前苏联КузнецовА.А等人上世纪七十年代提出了机构可靠性的概念,并探讨了飞行器上各种可分离机构和转动机构的可靠性分析方法。H.P.勃鲁也维奇等人较全面地分析了机构运动副中的原始误差,提出了分析运动副间隙引起的机构输出误差的转换机构法,为机构运动可靠性的研究奠定了基础。八十年代,以色列的Sandler应用概率方法对齿轮、凸轮机构的运动精度做了深入研究,采用非线性方法分析了间隙对机构运动的影响。以色列学者Lee提出了考虑运动副间隙的有效长度模型,成为工程上考虑运动副间隙进行可靠性分析的依据。日本学者Misawa分析了卫星天线进行展开动作时驱动力矩大于阻力矩的可靠度。Zhu、Ting研究了考虑尺寸公差和运动副间隙的平面和空间机器人进行可靠性分析的方法。Rao S、BhattiP、Kim J、Song等采用Denavit-Hartenberg变换矩阵建立位移误差传递矩阵,计算了机构运动可靠度。Wittwer、Choi、Yoo将线性回归理论,均值一次二阶矩法和蒙特卡罗模拟法等可靠性分析方法结合到机构运动和动作可靠性分析中。Sandu等提出了考虑参数随机性进行多体运动学建模的方法。Bowling将可靠性优化设计理论应用于机构设计过程中。
在研究方法上,国外对机构运动可靠性分析已提出了微分法、复数矢量法、矩阵法、环路增量法等机构建模方法考虑制造公差、运动副间隙等因素的影响,采用结构可靠性算法、模糊数学方法、区间分析法来分析评估机构可靠性。微分法、复数矢量法、矩阵法和环路增量法均是根据机构的几何拓扑关系,建立机构运动学解析模型,然后在此基础上通过数学方法得到机构的输出误差。微分法通过对机构运动输出方程在各参数的数学期望进行微分求得机构的输出误差。复数矢量法通过矢量的加法和乘法来获得误差传递,但最终误差函数式含有大量的偏导数。矩阵法对于复杂机构需要计算高阶矩阵的运算,特别是求逆运算。环路增量法通过分析相邻构件之间的作用力方位及输出构件上参考点的运动轨迹方式,建立机构误差传递的数学模型。总体来讲,这几类方法都只适用于建立简单机构的运动学模型,考虑的影响因素也只限于与运动学相关的影响因素,如尺寸误差,运动副间隙,磨损等因素。当需要分析机构的动力学相关误差时,这几类方法的使用受到了限制。
在研究对象上,机构运动可靠性的研究涉及简单的平面连杆机构并逐步向复杂的飞机起落架、空间机构、机器人等机构扩展,由刚体机构向弹性机构扩展。目前,考虑损伤累积因素的复杂机构时变可靠性分析评估受到关注,同时寻求快速有效,精度较高,便于操作的机构运动可靠性计算方法,依然是可靠性理论研究中值得关注的问题。
2、机构多体动力学分析与可靠性仿真
前述研究侧重在机构运动可靠性,建立在多刚体运动学分析的基础上,不考虑构件受力之后发生的变形,适于机构运动速度较低、构件刚度较大的情况。随着柔性机构在航空、航天和机器人等装备中的大量应用,刚柔混合机构的可靠性设计理论和方法逐渐受到重视。刚柔混合机构工作中往往要承受多因素联合作用,从而导致机构可能产生多种故障模式,使机构的性能和功能发生退化或劣化。这种情况下,基于多刚体动力学分析的机构可靠性方法中不再适用,因此人们发展了一种称为KED(Kineto-Elasto Dynamics 运动弹性动力学方法)的柔性机构动力学分析技术。这种方法将机构的真实运动近似地看成刚性运动和弹性变形叠加而成,机构整个运动过程被离散化为一系列机构位置,在每一位置上,机构均被视为一瞬时结构,从而可借用有限元法求出弹性位移。KED方法逐渐应用在弹性机构动力学分析和弹性机构可靠性分析上,Zobairi等利用KED方法对机构运动学参数进行分析,提供了构建几何尺寸的优化设计方法;Surdilovic和Vukobratovic应用KED方法建立了机械臂的模型,并提供了一种效率较高的可靠性计算方法。由于KED方法计算复杂,柔性构件的动力学方程是时变微分方程,在运动过程中机构动态响应难以显式表示,因此只适用于简单机构的可靠性分析,对于复杂机构进行可靠性分析则未见到公开报道。
随着多体运动学和动力学仿真软件的成熟,如ADAMS、LMS-Motion、Simpack逐渐具备刚柔混合建模和仿真能力,为借助这些软件开展机构可靠性仿真分析奠定了基础。采用仿真模型能够较完整的描述原机构的输入输出关系,模型中既可以考虑机构运动学相关的影响因素,又可考虑机构动力学的相关影响因素,如速度、摩擦、载荷、变形等因素。通过建立机构的参数化仿真模型,利用蒙特卡罗方法进行上百万次的模拟计算,然后利用统计方法得到机构可靠度。当可靠度很高时,蒙特卡罗法需要的抽样次数太多,导致计算效率很低。为了提高复杂机构的计算效率,最普遍的方法是仍然是利用多项式响应面法、Kriging模型、径向基函数、人工神经网络、支持向量机等多种方法进行复杂机构的可靠性分析。
总的来看,机构可靠性与结构可靠性都通过建立功能函数进行可靠性分析计算,采用的可靠性计算方法基本是一致的,主要区别有2点:
1)故障表征参数不同,结构可靠性一般用应力、应变、损伤等建立功能函数,机构可靠性一般用运动精度、误差、速度等建立功能函数。
2)故障表征参数计算方法不同,结构可靠性一般采用有限元方法计算应力、应变等,机构可靠性一般采用多体运动学、多体动力学方法计算运动精度、误差等,甚至会考虑构件的结构变形影响。
3、机构可靠性分析与应用步骤
图1 给出了机构可靠性分析的主要步骤:
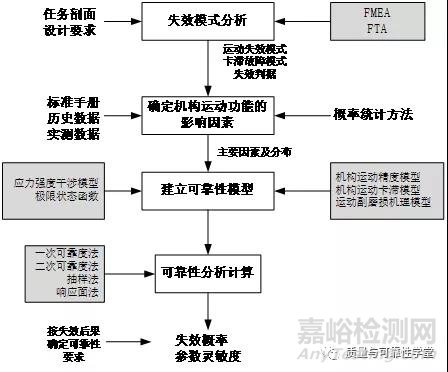
图1 机构可靠性分析应用方式
(1)根据任务剖面和设计要求,采用FMEA、FTA方法,确定机构运动功能的关键失效模式,并依据历史经验、试验数据或已有故障信息,确定极限状态失效判据(机构运动精度达不到、运动卡滞、运动副磨损等)
(2)根据产品任务剖面和设计要求,并结合典型失效模式,确定主要失效模式的影响因素,并参考相关标准或历史数据确定影响因素的随机特征(分布类型和分布参数),在有可能的条件下也可通过试验获得影响因素的随机特征量;
(3)依据导致机构运动失效的判据,如运动精度、卡滞、运动副磨损等,考虑主要影响因素及其随机特征,采用应力强度干涉模型或极限状态函数建立可靠性模型;其中对于代表机构运动功能的表征量,如位移、速度、加速度、驱动力等,此处假设了能够建立主要影响因素与特征量的显式运动学公式,如果采用ADAMS等多体动力学软件进行计算时,则应按集成CAE可靠性应用方式,构造表征量的近似响应面模型来建立可靠性模型。
(4)应用可靠性计算方法(一次可靠度法,二次可靠度法、抽样法和响应面法等)进行计算,确定可靠度的数值,并进行参数的灵敏度分析。
(5)当计算的可靠性结果达不到设计要求时,可依据参数灵敏度结果对设计进行调整迭代,直到达到设计要求。

来源:质量与可靠性学堂


