前言导读
手术机器人是一种先进的医疗设备,借助微创伤手术及相关底层技术的发展而发明。手术机器人被用于在高于人类能力的微创伤手术领域中实现高于人类能力的对手术器械的精准操控。手术机器人通常由手术控制台、配备机械臂的手术车及视像系统组成。外科医生坐在手术控制台,观看由放置在患者体内腔镜传输的手术区域三维影像,并操控机械臂的移动,以及该机械臂附带的手术器械及腔镜。机械臂模拟人类的手臂,为外科医生提供一系列模拟人体手腕的动作,同时过滤人手本身的震颤。
机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床上外科上有大量的应用。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
经过数十年发展,手术机器人现在主要用于五个快速增长的主要外科领域,其中的骨科、介入手术机器人是及其重要的一个版块。
手术机器人市场概览
当前,随着人工智能、物联网等新科技的快速渗透,医疗健康正在与机器人全面融合,引领外科技术大变革。手术机器人行业迎来快速发展,赛道火热,备受资本青睐。
根据Frost & Sullivan的统计,2020 年全球机器人手术市场规模为 61 亿美元,预计从 2021 年到 2028 年将以 17.60% 的复合年增长率增长,到 2028 年将达到 222.7 亿美元(折合人民币约为1414亿元)。
我国手术机器人市场发展迅猛,根据Frost & Sullivan的统计,市场规模由2016年的人民币853.6百万元增至2020年的人民币2,934.5百万元,年复合增长率达36.2%,预计2030年中国手术机器人的市场规模将达至人民币58,425.9百万元,年复合增长率为34.9%。
手术机器人是将机器人技术应用在医疗领域,显然的,机器人手术是使用机器人系统完成的外科手术类型,机器人辅助手术的开发旨在克服现有的微创手术程序的局限性,并增强外科医生进行开放手术的能力。
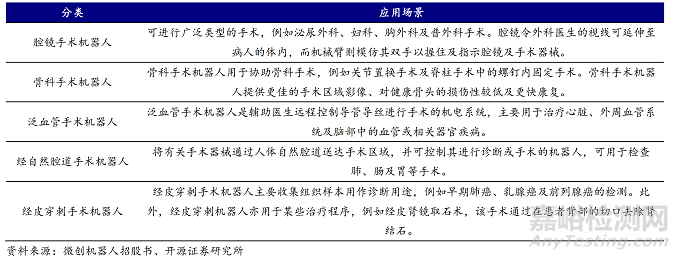
手术机器人集成了医学、材料学、自动控制学、数字图像处理学、生物力学、机器人学等诸多学科为一体的新型交叉科学。一般情况下,从临床医学应用角度可将手术机器人主要分为腔镜手术机器人、骨科手术机器人、泛血管手术机器人、 经自然腔道手术机器人、经皮穿刺手术机器人。
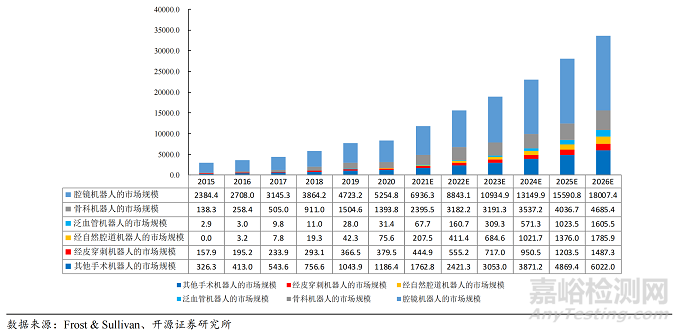
下面两幅附图分别给出了各主要细分手术机器人的应用场景和市场规模情况,供各位读者参考。
笔者认为,随着时间发展,对于国内手术机器人市场而言,各大厂商会面临如下5个方面的竞争,分别为:
1.技术战,入局者众多,内卷严重,而且在技术上目前国外先进巨头具有一定优势,国内厂家只有通过技术上“高人一等”才能“脱颖而出”。
2.临床战,目前手术机器人虽然种类繁多,但是依然是医械法规强监管的产业,且市场受众面以大城市的大医院为主体,在如此众多的品牌上市过程中,临床资源就显得弥足珍贵。
3.融资战,手术机器人是一个多学科高度集中的产品,研发周期长,临床要求高,各方面人力资源也紧张稀缺,必然需要高额的投入,这些都需要大量的资本投入,因此手术机器人的玩法从资本市场来讲其实就是“谁的资本强谁成功率大”。
4.营销战,随着国内、国外厂商的产品逐步上市,需要“卖出去”,也需要市场各群体的认同,更需要占据市场率,因此在众多同类型同适应症的手术机器人中“卖得好”才是各大厂商的终极目标,才是“长久之计”。
5.专利战,专利对于手术机器人而言十分重要,当然也是技术层面的演化,更是各大手术机器人厂商市场角力的重要武器,甚至是“终极核武”,规避设计风险、占据市场率都需要专利的辅助,达芬奇在腔镜机器人领域“叱咤风云”恰恰是得益于专利。
创新医疗器械动态
近日,中国医学科学院阜外医院成功应用微亚医疗科技(苏州)有限公司全自主研发的“微亚冠通”微创血管介入手术机器人,完成世界首例全程机器人辅助冠状动脉造影手术。
此举标志着“微亚冠通”成为国内首款通过自主研发,实现冠脉造影术式临床应用突破的手术机器人。
血管介入手术机器人优势明显
根据《中国心血管健康与疾病报告2019》,我国心血管患者人数3.3亿人,并且患病率及患者人数均处于上升态势。微创血管介入手术作为心脑血管疾病一线治疗手段具有广大的应用场景,国内目前已有超过1800家医院开展血管介入手术,2019年仅冠脉介入手术量就达到504万例,其中约400万例仅做造影。
而传统血管介入手术存在专业医生稀缺、且手术面临辐射风险等痛点,医生手术全程在X射线下进行,防护服重达20KG,对医生体力消耗极大,且当前防护手段只能有效屏蔽约50%辐射,影响医生身体健康。
血管介入机器人优势明显。它可实现室外操作,避免射线辐射;坐姿操作,屏幕易于观察,手术更稳定;具备点动能力,递送精度更高;50倍扭力放大,导丝操控更容易;同时可以实施远程手术,使用场景更广泛。
完成世界首例全程机器人操作
此次冠脉造影手术由中国医学科学院阜外医院教授窦克非,在导管室外通过微亚冠通手术机器人的操作台,对导管、导丝进行全程操控。利用手术机器人快速、精确地将造影导管递送至受试者心冠血管的冠状动脉开口,在造影导管内注射造影剂,从而顺利完成受试者冠状动脉造影手术。目前已上市的同类产品,需要人工手动将导管送到升主动脉根部,再进行机器人辅助操作。
值得一提的是,手术成功验证了微亚医疗血管介入手术机器人对现有冠脉造影术式的临床价值,这主要包括:
1、全程机器人操作,医生不受DSA辐射:医生在导管室外进行操作,手术过程中术者受到辐射量为0;
2、机器准备时间短:手术开展前仅需5分钟便可完成全部安装,且机器模块设计精巧,易于医生理解和操作;
3、手术操作稳定:有了机械手臂的配合,大大的提高了手术的精确度,故而降低了术后并发症的概率。
本次冠脉造影手术的成功标志着微亚医疗在血管介入手术机器人领域的技术创新在临床上获得了验证。“微亚冠通”成为国内首款通过自主研发,实现冠脉造影术式临床应用突破的手术机器人,同时也完成了世界首例机器人全程辅助的冠状动脉造影。
专利技术解析
微亚医疗对其手术机器人进行了全方位的专利布局,笔者针对其独特的耗材递送展开专利技术解析:
1、技术问题
微创血管介入手术是心脑血管疾病诊断、治疗的基本手段,目前实施的多数血管病变诊断、血管重建手术都需借助这项技术。导丝-导管的操作是微创血管介入手术的核心内容,决定着手术质量。目前,介入医生借助数字剪影血管造影成像技术(DSA)手动完成导丝-导管在病人血管内的定位操作。导丝、导管、球囊导管是手术中使用的基本器械,使用机器人装置进行导丝等医疗器械的定位操作,有利于提高定位操作精度与稳定度,将医护人员从辐射中解放出来、避免医护人员因穿厚重铅衣而带来的附加伤害、避免医护人员因疲倦而造成术中操作不可靠的情况、改善传统介入手术极度依赖医生个人经验的情况、降低介入手术的学习曲线、为血管介入手术提供更精确的操作。
医用导管为空腔管状结构,内部的空腔用作造影剂注射通道或医疗器械输送通道。由于导管硬度较强不便于完成血管选择,采用柔顺性较强的实心导丝引导导管进入靶定血管。手术过程中,医生在股动脉或桡动脉进行血管穿刺并留置血管鞘,作为导管进入血管的入口。导管经血管鞘入患者体内的血管,导丝从导管内部的通道进入血管。通常由介入医生与其副手两人四手完成对导管、导丝前进、后撤以及旋转的控制。
在传统技术中,利用机器人辅助血管介入手术时,利用机器人实现导丝前进、后撤以及旋转是最为核心的功能之一。要实现对导丝的运动控制,首先须实现导丝的无损夹持。由于导丝表面为超滑泥鳅涂层,而传统夹持方法易出现夹不紧或夹持过紧而损坏导丝表面涂层。同时,导丝转动不能受夹持装置的干扰,因此导丝转动装置必须与夹持装置一体化。此外,导丝会直接进入患者体内,对无菌条件有较高的要求。
传统血管介入手术机器人的导丝驱动装置存在以下几个方面的问题:由于导丝递送和旋转采用夹持方法,现有导丝驱动装置只能与导丝夹持装置协同操作。由于导丝表面具有超滑泥鳅涂层,采用夹持方法实现导丝递送和旋转不能克服遇到阻力时,导丝容易滑动、导丝递送和旋转精度低的问题,导致导丝递送装置递送效果不稳定;而且结构复杂、无菌环境实现不彻底。因此,业内存在对性能进一步改进的导丝驱动装置的需求。
2、核心技术方案
一种用于血管介入手术机器人的导丝驱动装置,包括:壳体、导丝旋转驱动机构和导丝递送驱动机构,导丝旋转驱动机构包括动力输入轴、动力输出轴和传动机构,动力输入轴沿壳体径向延伸,其动力输入端与外部驱动源连接,动力输出端上设置有第一传动齿轮,动力输出轴沿轴向延伸并包括壳体内部的内轴段和壳体外部的外轴段,外轴段为空心轴段,内轴段上设置有第二传动齿轮,传动机构包括第一和第二传动齿轮;动力输出轴上设置有电机安装台,电机安装台上设置有中心孔,该中心孔与外轴段的内轴孔联通;导丝递送驱动机构包括电机,电机固定地安装在所述电机安装台上,其输出轴从中心孔伸出并与输出轴同轴。
其目的是提供一种导丝驱动装置,其能够适用于以非夹持手段实现导丝递送和旋转的导丝旋转与递送传动装置,由此实现导丝的精确与可靠递送,不会对导丝造成任何损伤;而且可实现术中无菌环境隔离。
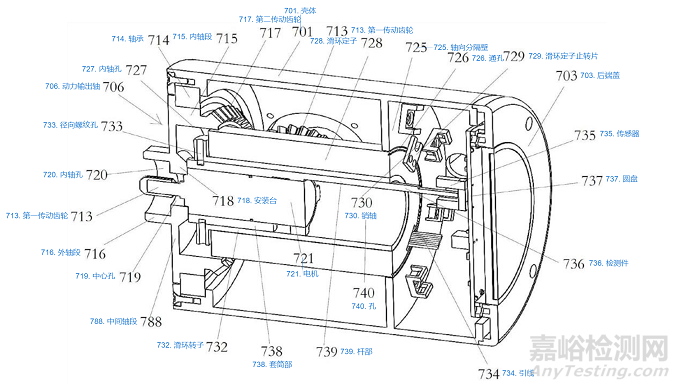
如图所示,导丝递送驱动机构包括作为动力源的电机721,所述电机的轴向前端抵接所述安装台718,其上形成有周向分布的螺纹孔,螺纹孔的位置与安装台718上形成的螺钉孔722的位置相对应,从而可借助于延伸穿过螺钉孔722的螺钉将电机安装在安装台上。所述电机721的输出轴723从所述中心孔伸出,位于导丝旋转驱动机构的动力输出轴的外轴段716的内轴孔720中,并与所述输出轴同轴设置,输出轴723与实现导丝递送的驱动轴连接。
输出轴723的外周面轮廓为多边形或D形,与实现导丝递送的具有对应内轮廓形状的驱动轴接合。
导丝递送驱动机构的电机721固定在导丝旋转驱动机构的动力输出轴706上,因此在导丝旋转驱动机构操作时,该电机将随动力输出轴706一起转动,由此可能导致的问题是,与电机连接的导线可能会发生缠绕问题。
因此,作为一种优选的方案,可在导丝递送驱动机构中设置导电滑环来解决导线的缠绕问题。导电滑环是一种标准元件,包括滑环定子和滑环转子,两者配装成可相对转动;导电滑环还包括转子引线和定子引线,转子引线与滑环转子相连,而定子引线与滑环定子相连。在使用中,滑环转子连同转子引线相对于滑环定子转动,而滑环定子与定子引线保持固定。
在导丝递送驱动机构中,导丝递送驱动机构的电机721与导电滑环的滑环转子固定连接,滑环转子的转子引线与电机连接,从而在操作中,滑环转子随同电机一起转动。
如图所示,在所述壳体701内部设置有轴向分隔壁725,分隔壁上设置有通孔726,导丝旋转驱动机构的动力输出轴的内轴段715形成有内轴孔727,通孔726的直径与内轴孔727的内径基本相同,并与滑环定子728的外径相适配。滑环定子的一个轴向端部配装在内轴段715的内轴孔727中,另一个轴向端部配装在分隔壁的通孔726中。滑环定子的位于分隔壁一侧的轴向端部上配装有若干个滑环定子止转片729,止转片径向外端形成有敞口的U形槽,而分隔壁上设置有销轴730,利用销轴和止转片将滑环定子固定。
滑环转子732的从滑环定子伸出的前端形成有若干个沿周向间隔设置的径向螺纹孔733,径向螺纹孔用以安装紧定螺钉。组装状态下,电机机身安装在滑环转子732的孔740中,利用紧定螺钉将电机相对于滑环转子固定。滑环定子的引线734与电源线相连,而滑环转子的引线(图中未示)与电机相连。在实际使用中,在导丝旋转驱动机构操作时,电机与滑环转子随导丝旋转驱动机构的动力输出轴706一起转动,由此解决了因电机旋转而导致的电机连接导线的缠绕问题。
如图所示,旋转位置检测器包括传感器735以及随动力输出轴706一同旋转的检测件736。传感器可以采用光电传感器,并安装在固定于后端盖703内侧的圆盘737上。在所示实施例中,传感器呈槽型光电传感器的形式,包括两个对置的槽壁,槽壁之一上设置有光发射器,另一个上设置有光接收器。检测件736包括套筒部738以及从套筒部向后延伸的杆部739。在组装状态下,套筒部738套装在电机外侧,并连同电机一起安装在滑环转子的孔740中,利用紧定螺钉将套筒部相对于滑环转子固定,从而电机、套筒部以及滑环转子作为一个整体一起旋转。所述杆部739的径向位置与传感器735的径向位置相对应,在动力输出轴706转动时,所述杆部随同动力输出轴706一起转动,在经过传感器时,杆部的端部从传感器的槽中通过,由此传感器可以检测动力输出轴706从而驱动导丝旋转的驱动轴的旋转位置,并基于检测结果控制驱动导丝旋转的驱动轴复位。
关于微亚医疗
微亚医疗成立于2021年,专注于研究和开发用于微创血管介入手术所需的新型医疗器械及耗材,是一家致力于开发国际尖端血管介入手术机器人的高新科技企业。微亚医疗已推出全新一代血管介入手术机器人,可同时开展冠脉、神经及外周术式的造影及介入治疗。技术方面,公司拥有全新独创的递送技术,在递送精度、稳定性、安全性等关键领域实现突破性升级,可全面满足医生介入临床需要。产品已受到国内多位顶级专家认可、临床进度国内领先。
结 语
诚如领域内人士共同认识的那样,手术机器人逐渐赢得市场追捧,站上了智能精细化发展、医保政策利好的快车道,全球以及国内各大手术机器人厂商也必会将达芬奇等先进机器人作为重要的标杆和对照,联动产学研医生多方力量,不断创新,推动中国手术机器人行业更智能化、精准化、微创化的发展,相关知识产权问题也必将会成为各大手术机器人厂商的研究重点课题,后续相关产品的的研发和专利事务值得持续关注。