您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2022-11-15 15:12
Myomo公司在不久前宣布从克利夫兰路易斯斯托克斯退伍军人管理局(Cleveland’s Louis Stokes Veterans Administration)医疗中心收到一份价值 120,000 美元的 MyoPro 设备订单,用于临床试验。该公司表示,该试验的主要目的是研究 MyoPro 在基于运动学习的治疗中对患有严重上肢运动缺陷的慢性中风患者的疗效,与单独基于运动学习的治疗进行比较。
1公 司 简 介
Myomo, Inc. 总部位于马萨诸塞州波士顿,是一家可穿戴医疗机器人公司,为患有神经系统疾病和上肢麻痹的人提供改进的手臂和手部功能。
2产品技术与专利

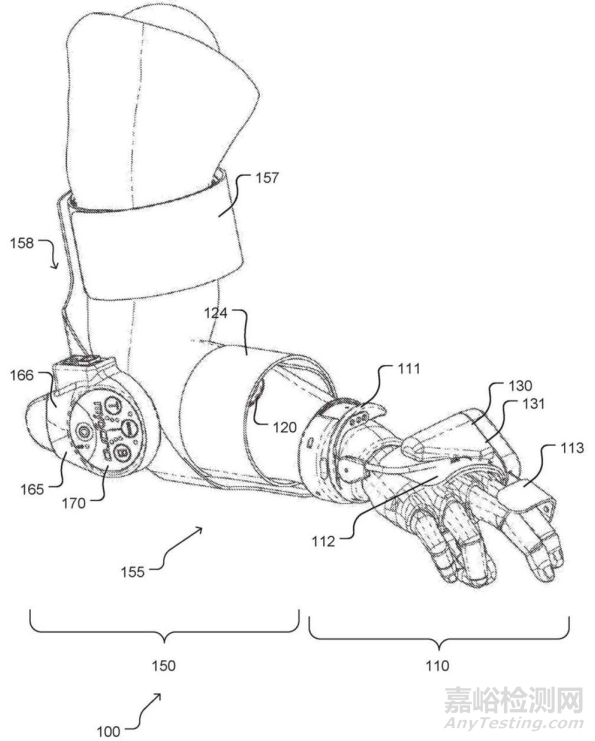
MyoPro产品构造
Myomo 开发和销售的MyoPro 产品是一种动力上肢矫形器,旨在帮助佩戴者恢复瘫痪或虚弱的上肢的功能,帮助个人进行原本不可能的动作和日常活动。MyoPro 还可以促进康复,包括肌肉再教育和增加运动范围。MyoPro 通过手臂上的非侵入性传感器感应患者自身的 EMG 信号,可以恢复个人进行日常生活活动的能力,包括自己喂食、搬运物品和做家务。
MyoPro 矫形器可以帮助涉及神经肌肉和神经系统疾病或损伤的疾病,包括:中风手臂麻痹、臂丛神经损伤 (BPI)、脑瘫及多发性硬化症。
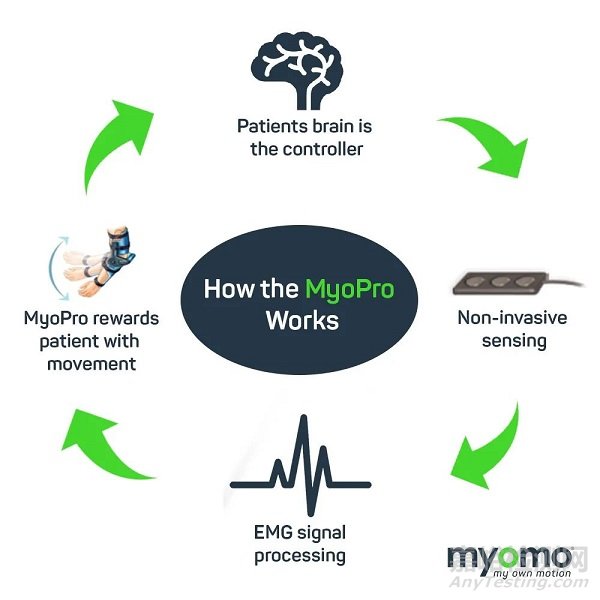
MyoPro工作原理
MyoPro 手臂和手部矫形器最初是在麻省理工学院与哈佛医学院一起开发的,其工作原理是读取皮肤表面的微弱神经信号(肌电信号)(完全无创、无植入物),然后激活小型电机来移动用户想要的肢体(无电刺激)。
用户完全控制自己的手、手腕、肘部和手臂;机械臂支架可放大微弱的肌肉信号以帮助移动上肢。它被称为“手臂动力转向”。
以下列出两篇代表性专利,若您对该产品技术的全部专利感兴趣,您可以联系文末作者。
(1)CN113397779A
动力矫形装置
摘要:本发明涉及一种动力矫形装置,包括至少两个支架子组件。第一支架子组件包括从肌电图传感器接收第一传感器信号的第一动力致动器组件。所述第一动力致动器组件施加第一力,用于驱动相对于第一关节定位的区段以相对于彼此移动。第二支架子组件包括第二动力致动器组件,所述第二动力致动器组件被配置为接收来自从由肌电图传感器、惯性测量单元及其组合构成的组中选择的传感器的第二传感器信号。第二动力致动器组件施加第二力,用于驱动相对于第二关节定位的区段以相对于彼此移动。所述第二力基于第一传感器信号或第二传感器信号。
权1 .一种动力矫形装置,用于辅助相对于与受试者上的一组肢体部分相关联的相应的第 一不同关节和第二不同关节的第一不同类型运动和第二不同类型运动,所述肢体部分选自 由上臂、前臂、手、一组手指、拇指及其组合组成的组,所述动力矫形装置包括:
可穿戴支架系统,所述可穿戴支架系统包括第一支架子组件和第二支架子组件,所述 第一支架子组件和所述第二支架子组件被配置为分别辅助所述第一类型运动和所述第二 类型运动,
所述第一支架子组件包括:第一区段和第二区段,所述第一区段被配置为可移除地附接到与所述第一不同类型运动相关联的第一肢体部分,所述第二区段被配置为可移除地附接到与所述第一不同类型运 动相关联的第二肢体部分;和第一动力致动器组件,所述第一动力致动器组件被机械联接到所述第一支架子组件, 以施加第一力来驱动所述第一支架子组件的所述第一区段和所述第二区段相对于彼此移 动;并且
所述第二支架子组件包括:第三区段和第四区段,所述第三区段被配置为可移除地附接到与所述第二不同类型运 动相关联的第三肢体部分,所述第四区段被配置为可移除地附接到与所述第二不同运动类 型相关联的第四肢体部分;
第二动力致动器组件,所述第二动力致动器组件被机械联接到所述第三区段和所述第 四区段,以向所述第三区段和所述第四区段施加第二力,由此使得所述第三肢体部分相对 于所述第四肢体部分移动;
所述动力矫形装置还包括控制器系统,所述控制器系统与所述第一动力致动器组件和 所述第二动力致动器组件通信,所述控制器系统被配置为从至少一个传感器接收第一信 号,所述至少一个传感器选自由第一肌电图传感器、第一惯性测量单元及其组合组成的组;
所述控制器系统还被配置为从至少另一个传感器接收第二信号,所述至少另一个传感 器选自由第二肌电图传感器、第二惯性测量单元及其组合组成的组;
所述控制器系统被配置为基于所述第一信号来确定所述第一力,并且还被配置为基于 所述第二信号来确定所述第二力。
(2)CN111698969A
抓握辅助系统和方法
摘要:一种抓握控制系统在抓握活动任务方面对操作者进行辅助。监视用于操作者的抓握活动肌肉的活动意图信号。从该活动意图信号识别用于抓握活动任务的意志操作者输入。基于该意志操作者输入操作一个或多个运动电机以将该抓握活动任务作为运动基元的链来执行,其中每个运动基元是沿活动路径所定义的具有单一自由度的抓握活动的基本单元。
权1.一种计算机实施的方法,所述方法采用至少一个硬件实施的计算机处理器来控制抓 握控制系统,从而在抓握活动任务方面对操作者进行辅助,所述方法包括:
操作所述至少一个硬件处理器以执行程序指令用于:
监视所述操作者的抓握活动肌肉的活动意图信号;
从所述活动意图信号识别用于所述抓握活动任务的意志操作者输入;
基于所述意志操作者输入,操作动力矫正器设备以将所述抓握活动任务作为运动基元 的链来执行,其中,每个运动基元是沿活动路径所定义的具有单一自由度的抓握运动的基 本单元。
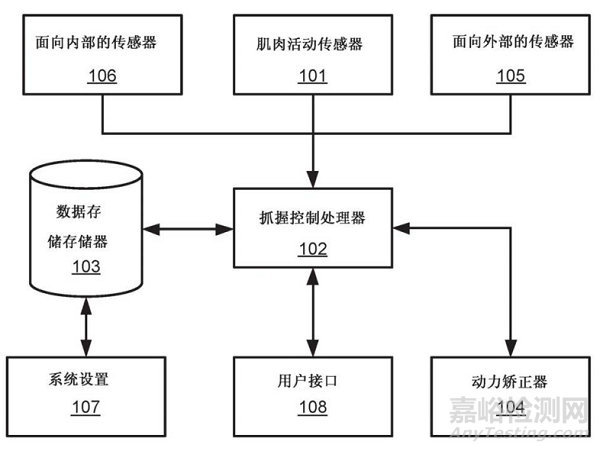
权12 .一种用于在抓握活动任务方面对操作者进行辅助的计算机实施的抓握控制系统, 所述系统包括:
肌肉活动传感器,所述肌肉活动传感器被配置用于监视所述操作者的抓握活动肌肉以 产生活动意图信号;
动力矫正器设备,所述动力矫正器设备被配置用于辅助所述操作者的抓握运动;
数据存储存储器,所述数据存储存储器被配置用于存储抓握控制软件、所述活动意图 信号和其它系统信息;
抓握控制处理器,所述抓握控制处理器包括至少一个硬件处理器,所述至少一个硬件 处理器被耦合至所述数据存储存储器并且被配置为执行所述抓握控制软件,其中,所述抓 握控制软件包括处理器可读指令以实施抓握控制算法用于:
从所述活动意图信号识别用于所述抓握活动任务的意志操作者输入;
基于所述意志操作者输入,操作所述动力矫正器设备以将所述抓握活动任务作为运动基元的链来执行,其中,每个运动基元是沿活动路径所定义的具有单一自由度的抓握运动 的基本单元。
来源:医械知识产权


