您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2021-12-12 18:33
类肌肉结构的各向异性水凝胶可以有效提高水凝胶取向方向的抗疲劳行为(疲劳阈值>1000 J m-2),但垂直于取向方向上抗疲劳裂纹能力很差(疲劳阈值100 ~ 300 J m-2),使得这类材料无法满足一些特定场合的应用需求,比如软体机器人、柔性电子、电子皮肤和组织补片等。
近日,受启发于心脏瓣膜独特构效关系,南方科技大学刘吉团队在Advanced Materials上发表文章“Bioinspired 2D Isotropically Fatigue-Resistant Hydrogels”,报道了一种简单而通用的仿生策略来设计与制造具有二维面向各向同性的抗疲劳特水凝胶。他们通过双向冷冻铸造工艺形成整齐排列的层状微/纳米结构,随后进行压缩-退火处理,制备出的水凝胶材料在二维平面的任意方向上都展现出优异的抗疲劳特性,疲劳阈值均超过1500 J/m2。
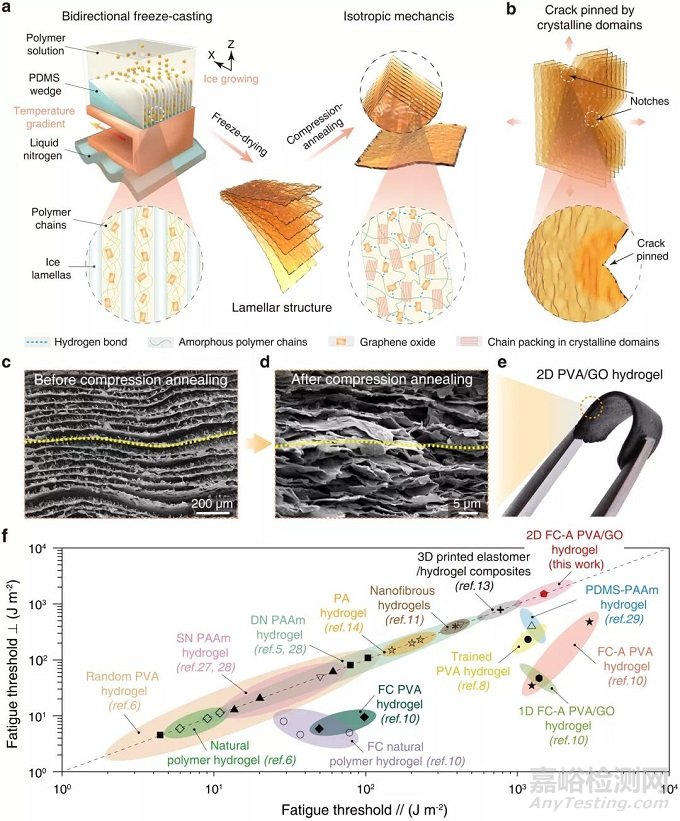
图1. 各向同性抗疲劳水凝胶的制备,多尺度结构和抗疲劳特性。
该工作所报道的二维各向同性抗疲劳水凝胶有望成为众多应用场景中二维面向承重部件的新型材料。作者设计并制造了一种效珍珠水母形态和运动方式的新型水下软体机器人,采用2D PVA/GO水凝胶作为机器人的头部承重部件(如图2所示)。这类各向同性抗疲劳水凝胶可作为力学传动部件,通过电驱动马达伸缩机器人的头部,实现该机器人可以在水下连续长期地向前游动(视频1)。在有裂纹存在的情况下,经过1,000,000多次的连续循环二维面内伸缩(水下游动长达450小时),裂纹明显明显拓展,表现出优异的二维抗疲劳特性(视频2)。
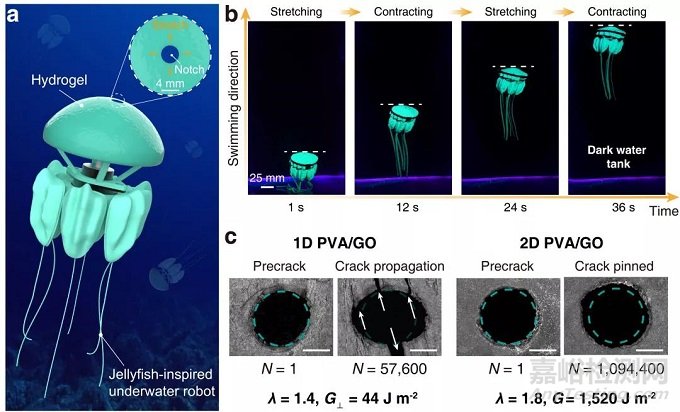
图2. 各向同性抗疲劳水凝胶应用于效仿水母的水下软体机器人,并经受百万次疲劳验证。
南方科技大学梁翔禹博士为该论文第一作者,刘吉副教授为通讯作者。该研究得到深圳市仿生机器人与智能系统重点实验室、广东省普通高校人体增强与康复机器人重点实验室、广东省自然科学基金-区域联合基金项目(青年基金)、广东省自然科学基金面上项目、深圳市自然科学基金面上项目等经费支持。
来源:Internet


