您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2021-01-29 09:26
振动分析师不仅要检测、诊断和预测机器故障,还要考虑如何系统地解决振动问题,这是可靠性维修的要求,也是振动控制的目的。振动控制超出一般意义预测维修的范围,涉及机器系统的设计和改进,全面掌握振动控制是高级振动分析的内容。
1、失效分析和振动严重性评价
在振动水平与机械可靠性之间存在直接的因果联系,振动是机械系统机械和结构部件中应力的指示。一般说,对应一个系统,大的振动水平指示大的应力水平;对应很小量的周期性应力增加,疲劳寿命可显著降低。因此,有必要保证一个机械系统的振动状态尽可能的低。
过去发展了很多标准,对振动水平多大是可以接受的提供一般性指导。不管如何使用这些标准评价严重程度,机械部件(轴承、密封等等)的持续早期损坏、旋转部件或支持结构的灾难性的损坏,应当说明振动水平可能过大。另外,这些标准应限于在设备的轴承部位的振动测量,并没有考虑作为支持结构系统、或机器结构部件的严重程度标准。
2、固有频率,振型和模态参与
振动分析师经常面对的机械系统是复杂的部件装配,为了改善设计,控制动态力的幅值或振动响应的水平,必须理解这些系统的响应特性。为了研究一台机器及其支持结构和/或基础的振动响应所建立的数学和实验模型可能相当复杂,然而,在试图进行振动分析或设计控制振动的方法之前,理解机械系统对动态负载的响应的方式是非常必要的。
所有结构化的机械系统可以由质量和刚度的组合来表示,系统可以利用一系列质量体、弹簧和阻尼器来建模型。建模是用数学描述物理对象以便预测其动态行为的艺术和科学,必须认识到,建模的过程涉及物理系统的数字表示,它提供一个近似解。数字的近似精度取决于模型的适当性。
模态振型表示一个固有频率对一个动态力的灵敏程度,在多自由度系统中,不仅是动态激励频率接近固有频率的程度,而且动态力施加的位置相对于该有关固有频率模态振型的最大参与点的关系,决定系统振动的大小。如果一个动态力频率接近固有频率,并且施加的位置和方向与振型的最大运动一致,那么振动响应最大。相反,如果动态力施加在模态振型没有任何运动的位置,将没有共振放大响应。
3、通过改变动态力控制振动
当机械系统承受某种性质的外部动态力时产生振动。动态力,有时称为力函数,随时间变化,可以是简谐、周期性但非简谐、非周期但以定义的方式和随机。
激励响应分析,计算当一个结构化的机械系统受到动态载荷 (Fdyn) 的作用时产生的振动的量。单自由度振动系统的运动方程式:

由动态力产生的位移解,如下:
由静态力产生的位移解,如下,就是力除以刚度:

比较上述二等式,静态位移和动态位移的差别,就是放大系数,如下:
下图是有阻尼的单自由度弹簧-质量系统的放大系数,有时也称为传递性曲线。对这个系统,随着动态力的频率接近固有频率、放大系数,因此计算的动态位移显著增加。在共振时需要阻尼来控制位移的量,如果没有阻尼,系统的响应将无限增大。
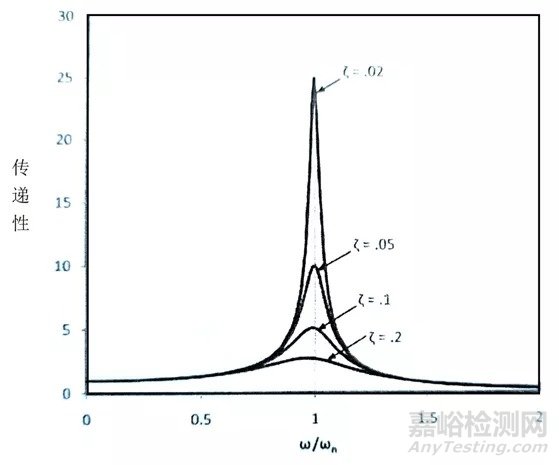
放大系数取决于动态力的频率 (fd ) 与系统的固有频率 (fn) 之比和阻尼的大小 (ξ )。在不希望振动的大部分情况下,振动控制在于减小放大系数;在希望产生振动的情况下(进料器和筛),振动控制在于最大化放大系数。因为固有频率是刚度和质量的函数,放大系数取决于刚度、质量和阻尼。对任何给定的力,振动控制的基础在于设计或修改结构化机械系统的这三个参数。
合成的振动位移取决于动态力 (Fdyn)。取决于它如何施加在机械系统上,该动态力可以表示为其谐频的组合。谐频的幅值通过对力的时间描述,进行傅里叶变换来确定。
动态力可以分为四种基本类型;简谐,周期,脉冲和随机。每一种类型力的频率成分不同。识别动态力是重要的,因为在一些情况下,可以通过去除、改变或减小力来获得振动控制。
4、振动控制基本转子动力学
机械系统由运动(往复或旋转)部分和静止部分组成,这两个部分之间的界面(轴承)由静止和运动部件组成。振动控制涉及完整的结构化机械系统的分析,在理解旋转机器的转子动力学的同时,理解支撑系统的结构动力学,是正确分析任何复杂系统所要求的。
转子通常由轴和某种工作部件或叶轮组成,风机转子可能有一个轴和一个风机叶轮,泵或压缩机可能有一个轴和一个或多个叶轮。一个叶轮的泵称为单级泵,六个叶轮的泵称为六级泵。有很多其他类型的转子,包括离心机、混合/搅拌机转子、电机转子、冲击破碎机等,各具其特点。
这些转子的工作件、叶轮等等,如果没有计算机分析,将是非常困难的。对于非常复杂的转子,需要有限元分析 (FEA) 计算其固有频率和振型。
5、通过改变支撑系统的振动控制
当测量振动的时候,测量的是整个结构化机械系统的响应。一个机械系统由运动部件(旋转、往复或转换)和支撑运动部件的静止部件组成,静止的结构部件包括轴承座、设备底座、楼层平台和基础组成。轴承是运动和静止部件之间的界面,他们是运动和静止部件的组合。振动控制针对运动部件(转子)时,将支撑条件作为一个简单的等效弹簧;实际上结构支撑系统的动力学也是需要关注的,一般作为结构动力学的领域。
结构动力学领域也涉及旋转和往复机器的结构部件。在转子动力学的领域,一般限于研究与转子的横向和扭转振型有关的转子响应,但是转子包括叶轮、转轮、盘、叶片等等,它们有固有频率振型,其独立于轴的横向和扭转振型。这些部件的动态响应也应该作为结构动力学的一部分来考虑。
机器的振动特性可能会受到支撑系统的结构动力学特性的显著影响,如果支撑系统太柔,机器振动可能变大;更严重的情况,如果结构共振,机器振动可能极大。
6、刚性水泥基础的结构动力学
刚性水泥基础有两中基本形式,第一种是方垫子置于土壤之上,机械设备螺栓安装在垫子上面;第二种基础有一个或几个水泥墩,从基础垫子伸出,机械设备螺栓安装在蹲着上面。
如果基础垫子和墩子的变形相对于土壤基础界面的变形不微不足道,可以认为基础是刚性的。结构化动态系统的主要弹性元件是土壤,水泥基础只作为质量参与;动态响应类似于一个刚性体。基础的主要固有频率与刚性体的平移或摇动相关。刚性基础除了刚性体振型之外,可能有弹性固有频率振型,但是这些固有频率远大于大多数大型机械设备的运转速度。
对于直接在土壤之上的基础设计,基础垫子有时称为扩展底座,负载从水泥传递到土壤,作为水泥基础垫子与其下紧密的表面之间的压力扩散开。
7、简谐力与地面振动的隔离
隔振设计通常基于单自由度振动系统 – 机器和基座有单个弹簧支撑的理论传递算式。由于大部分机械系统(如风机、泵、压缩机)需要不止一个弹簧支撑来保证稳定,即使非常简单的隔振系统会具有多个自由度。简化的隔振算式一般假定隔振弹簧之下的支撑结构和隔振弹簧之上的任何结构是刚性的,这些假定通常是错误的,可能会导致严重的振动问题,忽略支撑结构和隔振基座的结构动力学特性设计的隔振系统可能有问题。
机械隔振系统有三个基本部件,设备及其安装的结构基座,隔震器弹簧以及支撑隔震器弹簧的基础或结构。隔震器弹簧可以减少设备产生的动态力传递到基础或支撑结构。常见的例子是空气处理风机对建筑结构楼层的隔振,降低建筑的振动。隔震器弹簧也用于减小基础对设备的振动传递。
8、承受脉动力的系统振动控制
泵系统输送流体和压缩机系统输送气体的管路一般会承受动态压力脉动和机械动态力,风机系统输送空气的风道也会承受动态压力脉动。管路和风道的振动响应取决于其固有频率与产生的机械力和脉动频率接近的程度。泵和风机会产生正常的或非正常运行的压力脉动源,圆形的管路和方型的风道也有其基本固有频率振型。
管路和风道的振动分析和控制是结构动力学研究的一个特殊分支,管路和风道是动态系统的静态部件,它们一般不产生动态力,而是响应来自泵、风机、压缩机、鼓风机等机器产生的动态力,管路和风道中的声学共振导致动态压力脉动的放大。管路和风道振动的严重性评价与机械部件(如轴承和密封)的振动严重性评价有很大不同。

来源:普迪美状态监测


